Hi, I’m setting up my first from-scratch 5" copter and almost ready to start configuring it.
I used a Matek H743SLIM FC and a SpeedyBee 4 in 1 ESC, both the 30x30 stack footprint. Because they’re different manufacturers, the ESC motor mappings don’t correspond to the pinout of the Matek FC. I figured this would be fine and I’d just re-map motor control in software.
The quad is as “standard” as I can make it, an X-frame
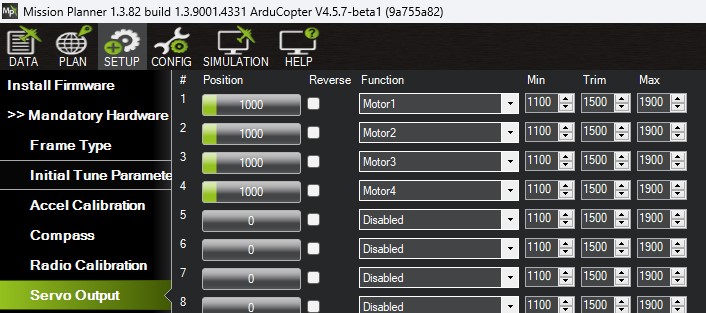
However, I am now confused about what the best way is to do this. Is “Servo Output” (to change which motor is number “1”, and clicking the “reverse” checkbox to presumably change from CW to CCW) the proper place to try this? It seems like I’m missing a part of the Mission Planner UI where I can see a model of the frame and assign labels and directions to the motors as needed…
I’d like to avoid the hardware approach of disassembling/reordering the DuPont connector pins on the ESC-to-FC cable, but I’ll do that if it’s the most straightforward way - I just find that too many cycles of removing those connectors makes them less reliable.
I’m sorry if I’m missing something obvious - I really have read through the documentation in the places where I thought I’d find this answer but it’s a lot to keep in my head and I may have missed something!
No. Either swap 2 of the 3 motor leads or use a ESC Firmware Configurator to reverse the motors. Suggest you flash Bluejay firmware to the ESC before advancing, it’s an advantage later when you are configuring and tuning the craft.
Other than that follow this and use Mission Planners Motor Test to confirm the correct Motor order and direction. Motor Order
You might find that a FRAME_TYPE other than X will be correct. Often BetaflightX is but that depends on a few factors. Run Motor Test and if it’s wrong just re-factor the servo outputs until it’s right.
Thanks for the reply! I’m still unable to map the motors properly.
Is there a trick to getting ESC configurator to connect to the ESC? My Matek FC board presents 2 serial ports when plugged in, but both of them give the “port in use” error when I try to connect, even if the ESC configurator is the only program open on the computer. Do I need to do something to put the FC into a mode where it will pass serial data transparently through it in order to talk to the ESC?
I get that I will have to re-solder 2 of the 3 wires on every motor whose rotational direction is backwards. But is there really no way in Ardupilot to change motor number/letter mapping?
The issue is that I am using Matek h743-slim and a Speedybee 55a 4-in-1 ESC, and when they are both aligned (battery leads facing backwards, Matek FC with arrow pointing forwards), the ESC’s motor assignments don’t correspond to what Ardupilot’s X Frame calls for.
Is totally disassembling the quad, hand-soldering UART connections to the ESC, and re-trying ESC configurator really the way I’m supposed to re-map motor numbers? I really feel like I’m missing some detail or rationale behind this not being easy to do in Mission planner…
Oh I understand one part of this better now - designating “Quad X - Betaflight” has to be done in the Full Params dialog and can’t be done from the “Frame Type” UI.
I think I can proceed with the rest of my debugging! I’m not going to spend more hours trying to get ESSC Configurator working unless I run into further issues that warrant it.
It’s really not that complicated.
Select a Frame Type.
Run Mission Planners motor test and see if the order is correct.
If not re-factor these until it is. That’s it.
Thanks Dave - I didn’t understand from your first reply that the servo-mapping screen is the right place to change motor assignments, just not the right way to do direction-reversal.
I knew it couldn’t be as complex as I was thinking!