I see you put the tether back on.
I can’t help you further, good luck. Follow the Tuning Blog.
I see you put the tether back on.
I can’t help you further, good luck. Follow the Tuning Blog.
Dave?? I’ve told you 10 times, it is not my property, i will have too pay 50000 INR if I loose it. What else can I do?? I cannot just risk it. I don’t have somewhere like a big shade where it’ll just fly bump above and fall back. Please do not do this. ![]()
Tell me some alternative atleast? You very well know, it goes out of control in previous videos as well. If it all were mine, i won’t even pause before removing the tether.
Regards
You can’t tune the craft with the tether so I see no point in continuing to help you.
Okay, I will find a place with several trees where if it flies, goes out of control I can atleast recover. That’s the only option then. I’ll remove the tether from now on. You won’t see any post with a tether. But do understand my condition as well. I’m not doing it for the sake of it. My degree will come at stake. If you remember starting posts I’ve never used a tether, it’s these latest incidents that have caused me to be concerned. The way it goes up in the air has scared me. Nonetheless. You won’t see a tether from now onwards.
I request you to kindly reply atleast the other doubts. ![]() .
.
Regards.
OK then back to an earlier post and then make another hover flight:
Reduce them by (~half) from these defaults:
ATC_RAT_PIT_D,0.0036 (0.002)
ATC_RAT_PIT_I,0.135 (0.07)
ATC_RAT_PIT_P,0.135 (0.07)
Actually leave the D term at default and set the others to 0.100
I have epoxied those GPS miounts before so they no longer pivot. It’s a poor design.
Telemetry sounds like an intermittent wiring/connection problem.
Okay, Also dave I was configuring kill switch, Motor Emergency Stop.
I have enabled RC6 opt as Motor Emergency Stop. But the values don’t seem to be right, but if i reverse the switch on my transmitter, it enables Motor Emergency Stop permanent. What am I missing?
Set it up as a arm/disarm switch not emergancy stop
okay so both seem to be working there was some glitch in my transmitter, I just wanted to know that will arm/disarm switch work same as kill switch. Will it disarm mid air? Coz motor emergency stop it surely will kill motors mid air.
Yes. If you disarm on the ground or in the air the motors will stop. If you disarm in the air, you cannot re-arm.
When doing your first test flight you dont need to go high in the air, in stabilised mode you should be able to bring the throttle up slowly and it will hover a few cm off the ground with no other input, if your machine can do that then proceed to a test flight with some altitude. but if something is wrong its low enough that you shouldn’t break anything if you land immediately.
The issue I face is that even if I lifted the drone like just 30 cm above the ground it would immediately gain altitude on its own, without any input from the RC, and then come ramming down or sometimes go so high that I might not even be able to bring it back. The tethers saved it from going away like this. Nonetheless, I’ve configured Kill switch and won’t use tether from now onwards. Let’s hope for the best.
Regards
what mode where you in when you were trying that?
Stabalize only sir.
Regards
It did this in AltHold from High Vibrations. It will not do this in Stabilize, you have full control. You simply need to learn how to fly a quadcopter.
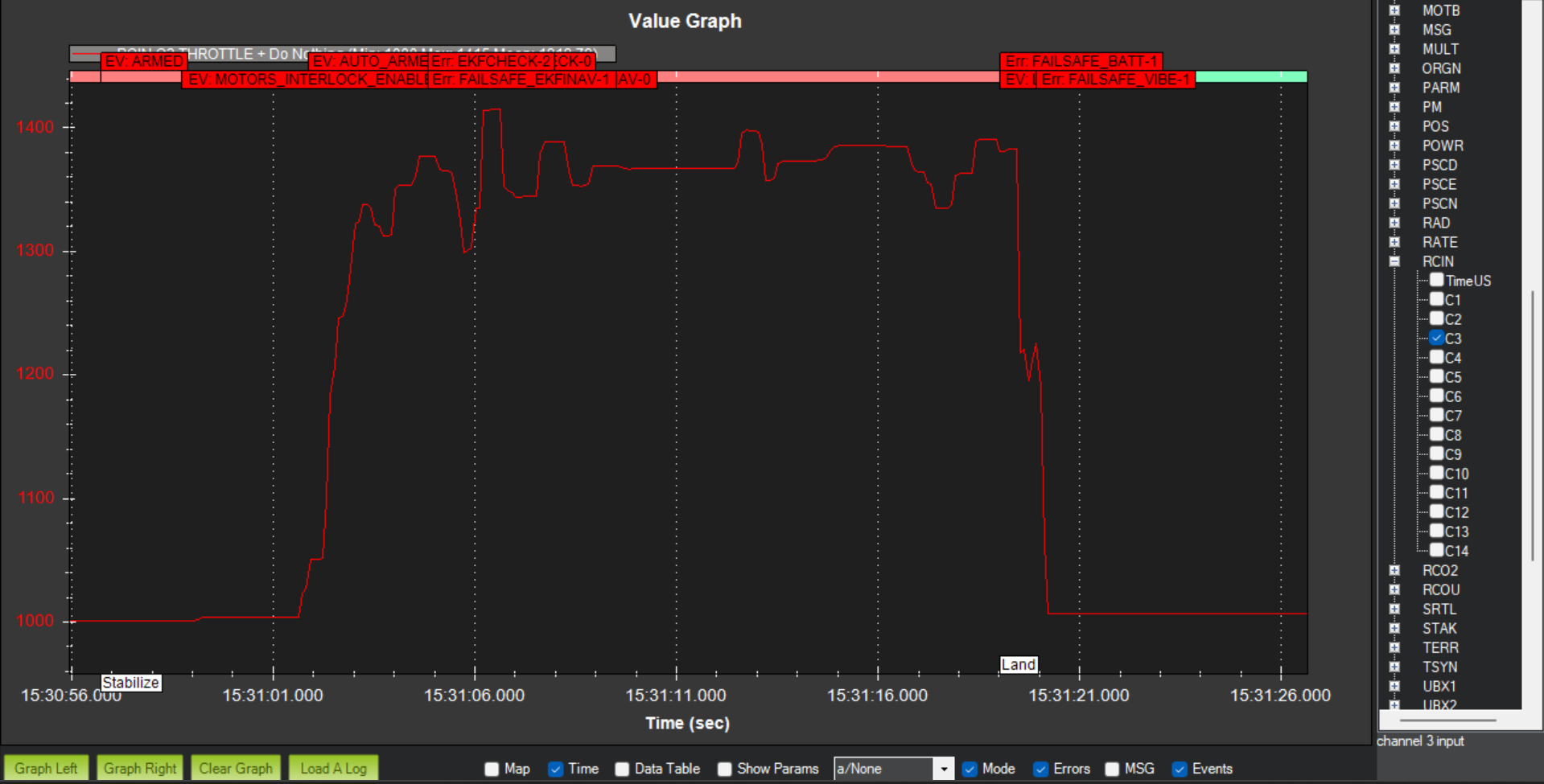
Here is your “without any input from RC”
Make sure you are in stabilised mode, arm it, then slowly raise the throttle until it starts to hover a few cm off the ground. you can then do some gentle pitch and roll movements to test if its responding as it should. if anything starts to get out of your control bring the throttle down immediately and it will land. Once you can confidently keep it in one place then add some altitude.
No No dave. How do I explain it. Recall The first time it crashed for which I posted a video also, the quad was in Stabalize only. Yes, there are many inputs. But in between, when it gained altitude on its own, I never gave that input and I lowered the stick as well immediately but by that time it was racing down only and then crashed. Then same happened next day when the quad was in stabalize mode only, and it again gained altitude on its own. I don’t baby throttle since you have told, I do give it a 50% throttle in the very begining, but it is not stable enough only and I would have to keep up with the stick to keep it up in the air. It’s like I cannot give it throttle past 20% with using roll and pitch adjustments, this is unlike from the kit 1 drone that I started this Thread with. That was super stable after a point. Here are a few more videos from today for you to get the idea how it behaves.
Ps: This is of morning, before posting the original log post today.
https://drive.google.com/drive/folders/1x4pbDRkkZ-IY-W-hKBtArLBC25bQetl4
Regards
I don’t think so. No evidence of that.
Okay so,
And this is the Throttle output.
I don’t believe you, I believe the data. You show me a log where that happened and I’ll agree and apologize.