Oh alright sir, I will now do this like you have told. Thank you for this. I thought all params of my FC should be mathcing with the intermediate param files.
Regards
No. This is the correct order:
- Edit the parameter files to suit your particular vehicle.
- Write the edited intermediate parameter files to the FC using the compare function to control your own work.
Ask questions when unsure.
Two questions:
- What gave you the idea to do it the other way around?
- How would the intermediate parameter files be capable of changing (configuring) your vehicle?
Uups, @Janno , you are right. It is Amps per Volt. I will edit the formula to the correct. Thanks.
@adityapruthi01 take a notice from this
1 Like
If you did more than only one flight or test run.Confirm that the value of your consumed mAh is the total of all action between the two recharging events, and the recharge value is from the last recharge event after the flights or test runs
Oh alright sir, thanks for correcting, also, this value is to be entered in the calculated current if I’m not wrong?
Regards
Yes Yes sir, this way only, I thought that “all” params starting from imu temp to guided operation have to be hand edited by matching them from my FC params using compare params and then editing each value in the notepad++ file. But since i thought you wanted my sole specific FC params so I edited all files one by one to be matched with my FC. Yes, I have read most of the comments in each param, and adjusted them for my quad suitabilty, but coudn’t understand the tough ones yet, like PID controls, Logging, Notch filter setup.
I can directly compare the params to my FC with these intermediate files which i have edited according to my preference and I can select the ones to upload I guess.
Regards
Here is a picture of my power module configured on my quad sir.


I guess there is not much you can make out of these pictures.
But I sure ordered them from the above link I provided.
Regards
You really need to learn how to fly a multirotor. It’s imperative that you can fly confidently in Stabilize Mode.
There is still a huge amount of output oscillation which is strange with where the PID’s are now. Load the attached parameters file just like you did the previous one.
f450-12MAR.param (194 Bytes)
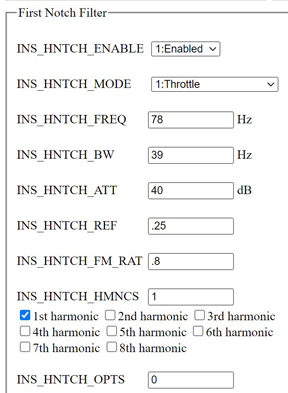
Also, set these Notch Filter Parameter’s:
The file structure is like this:
# Comment that you must not change 1
# Comment that you must not change 2
# Comment that you must not change 3
PARAM1_NAME, 35 # comment that you must change. Explain why you did the change
# Comment that you must not change 4
# Comment that you must not change 5
# Comment that you must not change 6
PARAM2_NAME, 35 # comment that you must change. Explain why you did the change
...
And yes, you must also change the parameter value (35 in the example above)
Provide a .zip file with these files (edited for your preference)
- 02_imu_temperature_calibration_setup.param
- 05_remote_controller.param
- 06_telemetry.param
- 07_esc.param
- 08_batt1.param
- 10_gnss.param
- 12_general_configuration.param
- 13_logging.param
- 14_pid_adjustment.param ← this should contain the parameters and values provided by Dave
- 16_notch_filter_setup.param
If you have never flown a drone before I suggest getting a drone sim app for your phone and getting some practice on that rather than crashing your real quad. there are lots of free sims in the app store.
Hi Dave,
Updated
Done
Regards
Sir, I started flying back in 2018, where I first built my KK 2.1.5 multiroter. Before that I always had those 2-3 chinese helicopters from interntional market. From that time, I have had multiple drones at home
Like starting with the Hubsan x4 H107L
followed by Hubsan Zino,
then Also tried the Dji Mavic 2 for a week borrowed from a friend. And then got into Pixhawk (kit1,no tuning done) with which I basically recorded an FPV footage of my college, during a fest. Now I have these Foldable chinese E88 drones lying around with which I daily play as it is fantastic hobby.
So, I think I can atleast hover it if not fly, when I say this one lands on its own, it actually does, its very hard to keep up with the sticks for this one. I know that this isn’t Loiter mode where everything becomes smooth. But as @dkemxr told few months back, before going into that modes, a good tune in stabalize mode, will always be necessary.
Regards.
I did all right but forgot to mention the explanation of why I changed that param to the value that I edited.
Yes, on it sir.
Regards.