Some progress but that’s a foolish place to fly that craft. Is there not a park nearby?
I see you did set the initial Tune parameters but these were not updated so run it again.
ATC_ACCEL_P_MAX
ATC_ACCEL_R_MAX
ATC_ACCEL_Y_MAX
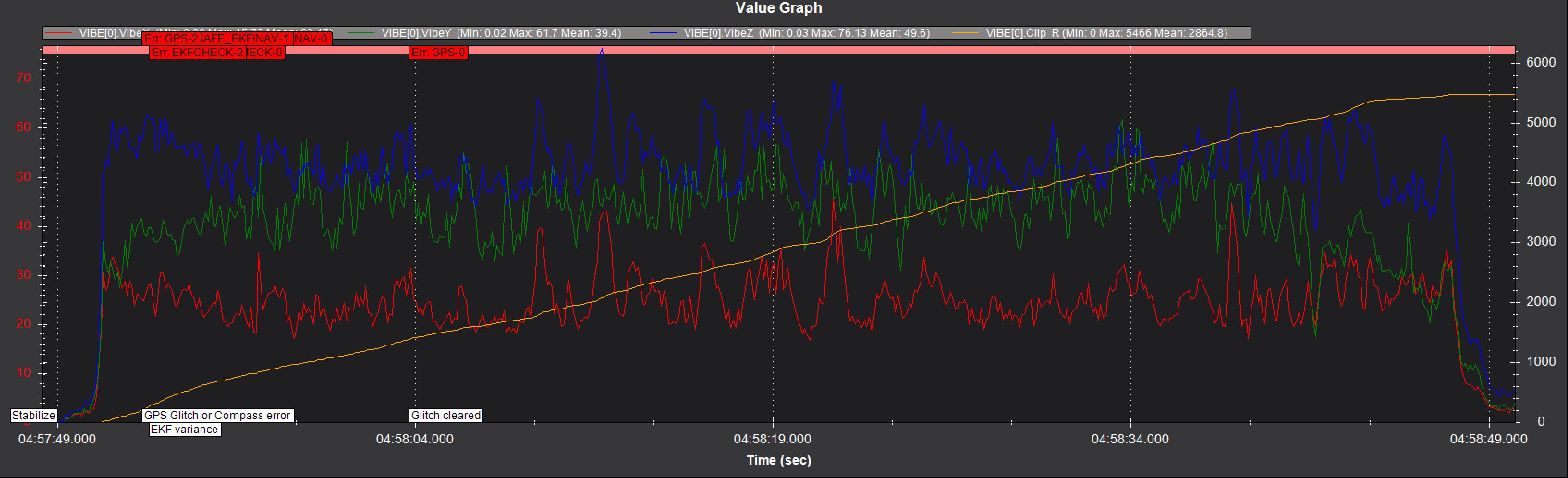
Your main problem is extreme levels of vibration with thousands of clipping events. This is responsible for the uncontrolled ascent.
Those motors with collet adapters are not doing you any good but have you balanced the props?
In any case before you can advance the vibration levels have to be greatly reduced.
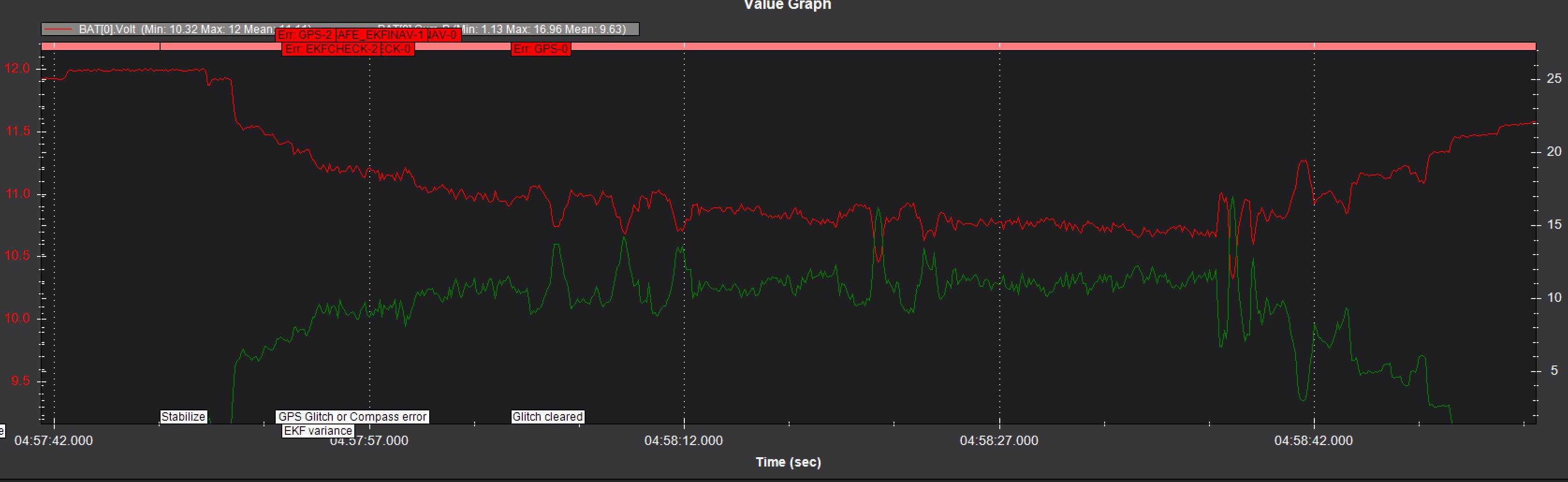
I don’t know where you are getting batteries but they all seem to be shit. Here it’s supplying expected current for that craft at hover but it’s sagging way too much.
This is the kind of thing one can expect when building with these components.
Hardware to avoid