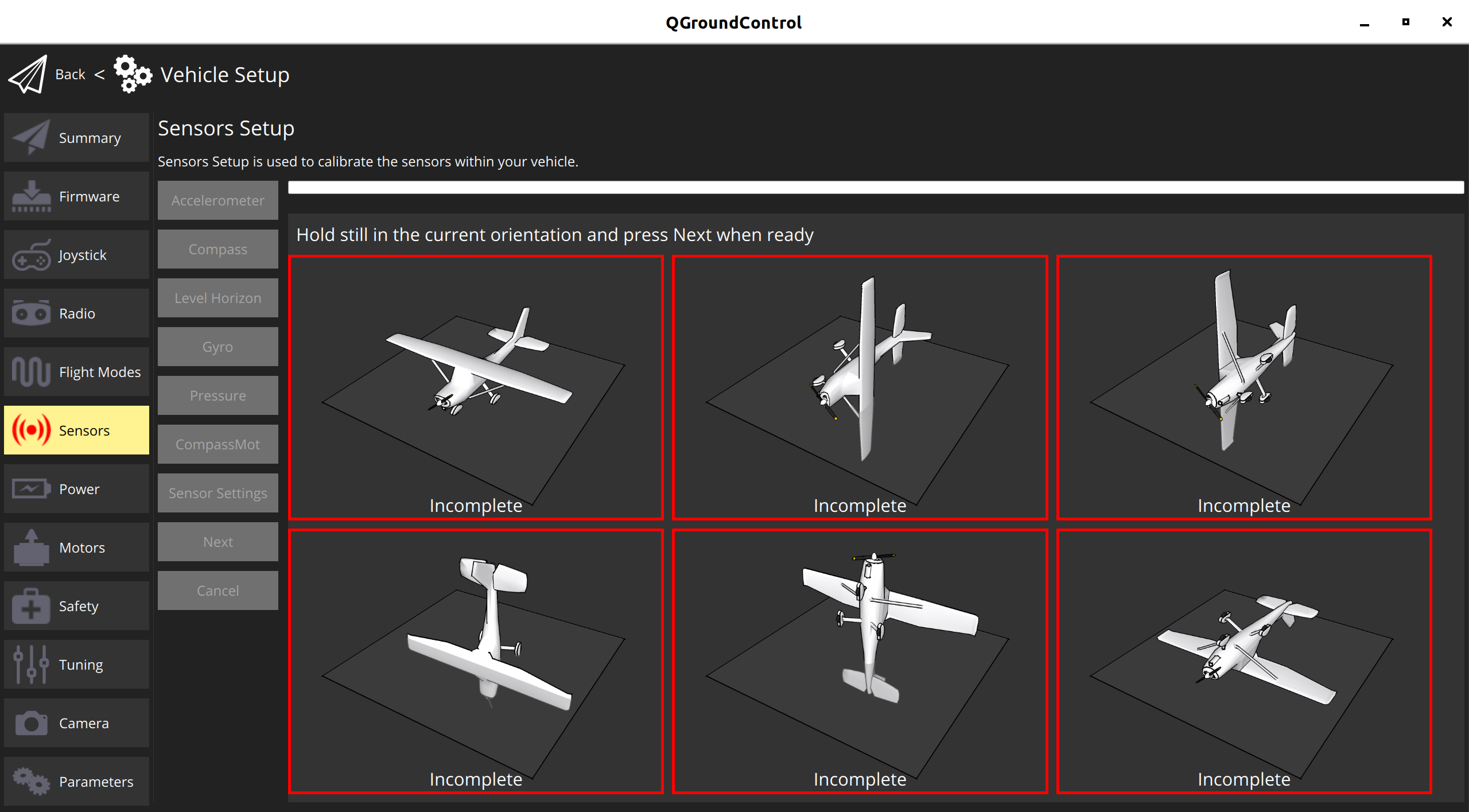
I have tried to calibrate ArduCopter through both QGroundControl and Mission Planner and literally nothing happens, I can’t even proceed through the process. The screenshot below shows what I see when I go to do accelerometer calibration through QGC.
I can’t press “next” to actually run the process. In MP, similarly, I can press the button to start accelerometer calibration and see the button text change to “press here when done” but nothing else happens. What is happening here? My drone is unusable as is.
Sure thing! ArduCopter version Copter V3.4.6, board is the Parrot Bebop 2 (followed the instructions here to replace Parrot’s proprietary controller with ArduCopter), connection is over wifi.
Roger that, I’m basically just looking for anything that works but Mission Planner is annoying because I can only use it on Windows and I’m usually on Ubuntu for development
Did you get any useful responses? I have a similar problem but most of the “answers” on this forum blame users for purchasing the wrong FC or not using Mission Planner.
What else can we say if you purchase an outdated, or not suitable FC for your application?
QGroundControl has many missing features, hence we ask you to use mission planner so that YOU do not waist your time. It is in your best interest to do so.
If you are unable to accept that the hardware and/or software you chose is not suitable for the task you try to accomplish, it is not the problem of the people who tell you that. After all, you asked for it.
We can only point you in the right direction, if you want to go a different path don’t cry and blame us when you hit a dead end.
Glad to hear you got it working! I’m on your side, I prefer QGC over Mission Planner >_< but more to the point, it’s a really annoying answer to just tell people to change their ground control station, since people have probably made their choice for a reason.
In regards to your earlier question, I never got it working with the Parrot Bebop but it was such an old drone I needed an upgrade anyways. I’ve never had issues with QGC and any other drone since, and I now generally use their daily build instead of stable because at least for now, it’s the only version that supports remote ID. Best of luck!