@olliw42 does the notify read the standard MavLink messages on the CANBUS?
Is there something special we have to do on the FC controler side to get this working ?
I am asking the question because I unplugged the BetaCopter PixHawk and connected my ArduCopter BeagleBone and the notification node is waiting…
there is no mavlink on the can bus (and this isn’t something I would recommend doing)
the UC4H notifier nodes consume the uc4h.Notify message (you should see them in the GUI)
so, yes, there is something special to be done on the FC side, it needs to be running a firmware which is supporting this (it’s like with the tunnel, won’t work either)
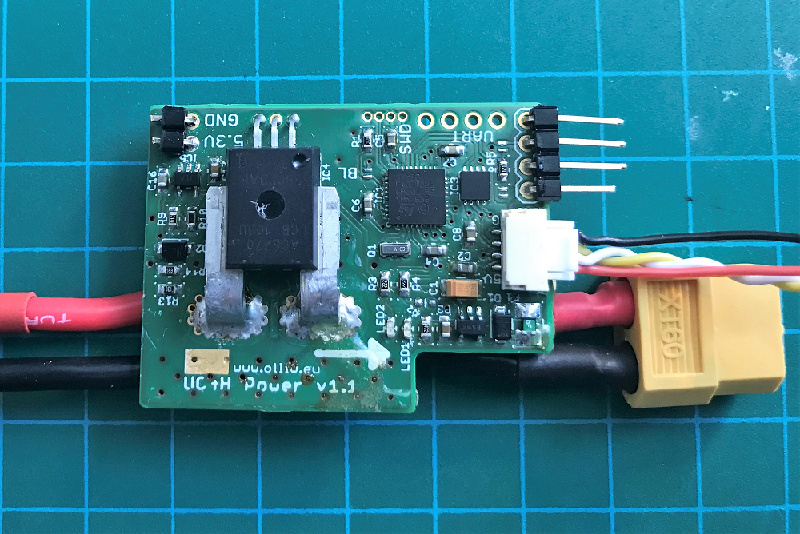
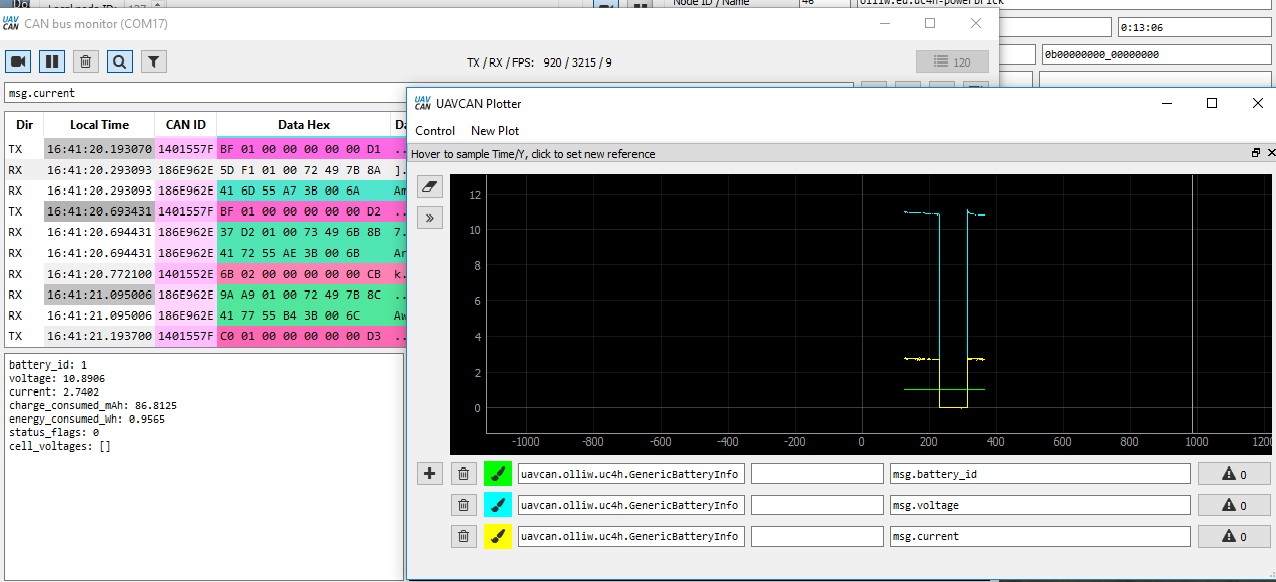
@olliw42 just received a present olliw.eu.uc4h-powerbrick UC4H Power v1.1
I flashed it with latest uc4h-powerbrick-v007.hex
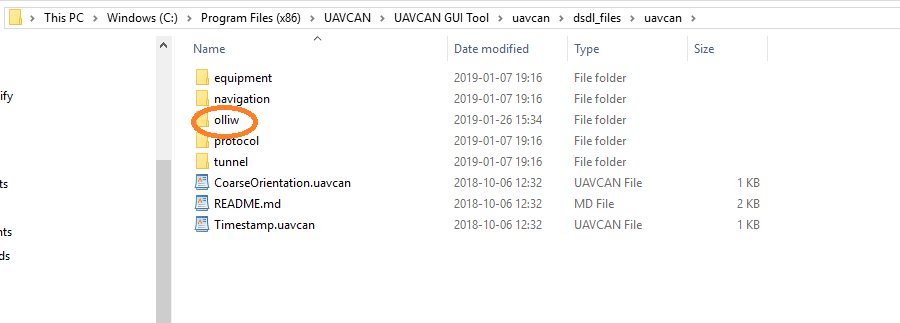
I copied dsdl files (olli) into C:\Program Files (x86)\UAVCAN\UAVCAN GUI Tool\uavcan\dsdl_files\uavcan\equipment\power
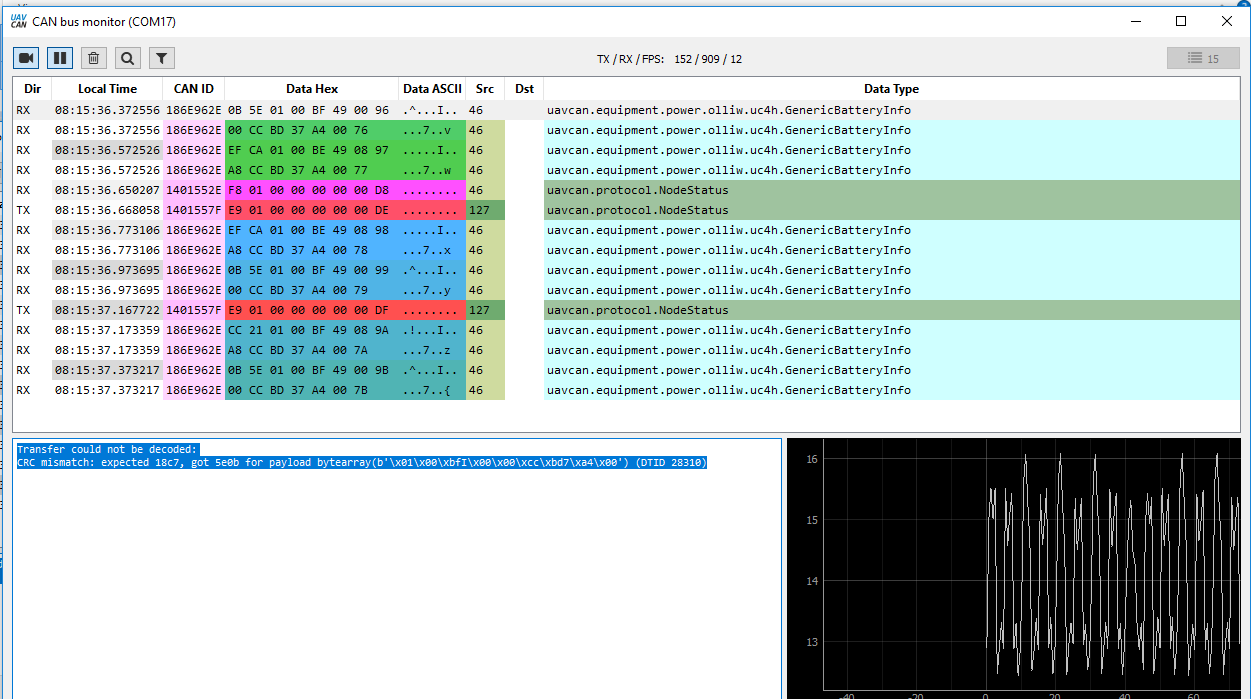
I can see the messages headers but there is a crc error:
I just tested with my setup, and it’s working here
looks like some dsdl inconsistency to me
the latest firmware is btw uc4h-powerbrick-v010, and not v007, maybe that’s it already
EDIT: maybe you could post a photo of your powerbrick, it’s quite some time ago I made it for Marc and can’t recall which one it is, just to know
weird, I frankly have no clue what’s going on
the “transfer could not be decoded” message so far I always only got then the dsdl was not consistent with the message (i.e. the id agreed, but not the message format)(and since the id seems to agree you get the name displayed)
I had checked that the dsdl in the git repo is identical to the one I use for the UAVCAN GUI tool, and I just double checked again by explicitely copying the dsdl from the repo to the gui subfolder … it all wroks fine here
could you post the dsdl or give a link to where you took it from?
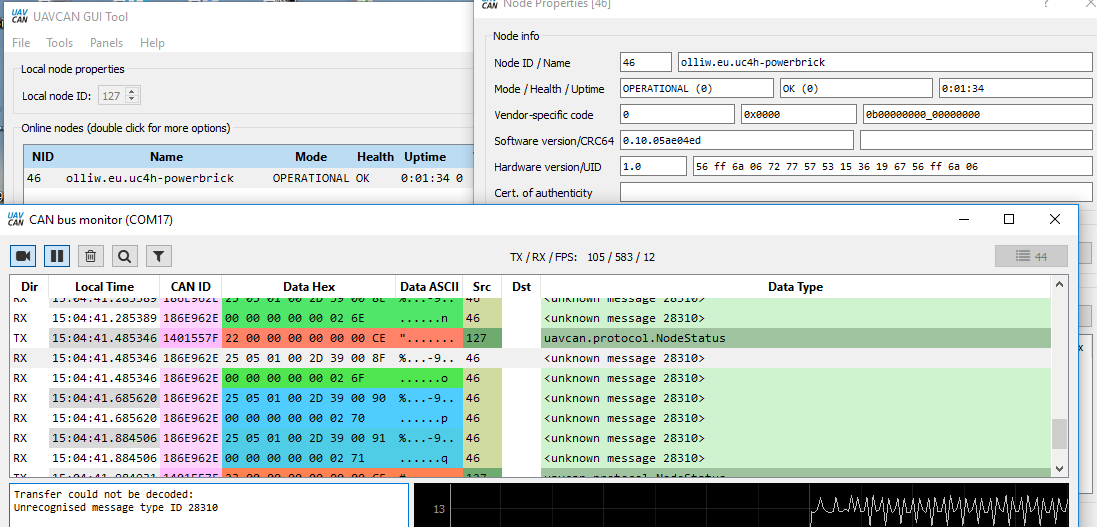
EDIT: to ensure that you really copy the correct dsdl to the correct place, you could delete the previous dsdl, and start the GUI, it now should not be even able to show the “…GenericBatteryInfo” name in the bus monitor
have you put the dsdl in the correct subfolder?
the sequence of folders must be identical to that in the repo
EDIT: just checked your gui screenshot in the above again, and it seems you have placed it into the power.equipment subfolder, which would be incorrect
They thus need to be made aware to the tool by copying the message definition files to a particular folder: Move the folder „olliw“ with the .uavcan dsdl definition files to the folder „C:\Program Files (x86)\UAVCAN\UAVCAN GUI Tool\uavcan\dsdl_files\uavcan\equipment\power“. Now, after a restart, the UAVCAN GUI tool should show the new messages in e.g. the bus monitor, and not display „unknown“.
oh sh…
this was so for the first version of the messages, but I have placed them in my “own” uavcan.olliw vendor specific section since quite a while, it seems I have updated the messages but have forgotten to correct the subfolder
I’m very sorry
the sequence of folders should match the sequence in the dsdl name, e.g. uavcan.olliw.uc4h.GenericBatteryInfo => uavcan/olliw/uc4h/28310.GenericBatteryInfo.uavcan
the sequence of folders should match the sequence in the dsdl name, e.g. uavcan.olliw.uc4h.GenericBatteryInfo => uavcan/olliw/uc4h/28310.GenericBatteryInfo.uavcan
so, the olliw folder should go up two folders, to a subfolder of uavcan
btw, if you happen to have a FrSky lipo multi cell voltage sensor, you also could use the cell voltage feature: For your v1.1 powerbrick, you would connect it to Gnd and Tx on the UART pin header, and would grab power from a C5V pin, e.g. on the CAN port pin header

 olliw.eu.uc4h-powerbrick UC4H Power v1.1
olliw.eu.uc4h-powerbrick UC4H Power v1.1