GKbytes
March 14, 2020, 7:12am
1
Can someone help me analyze the log:
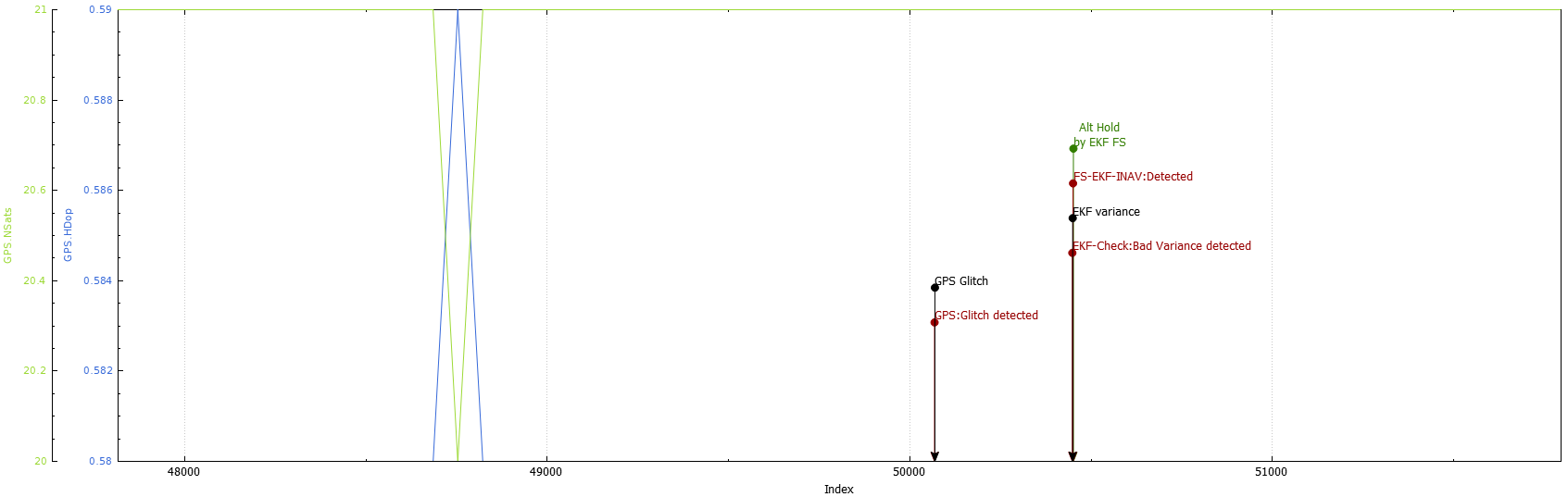
When taking the route, suddenly deviate from the route, and alarm: GPS glitch and EKF variance.
I saw the PWM average 1750, but the UAV still fell down
The whole falling process shows that the attitude is particularly stable.
I don’t know what happened. Can someone help me.
Here is the log:https://1drv.ms/u/s!AownCgkX5Znvk1yILhBOJce7vd9z?e=zLDKW4
This time, the crash is very strange. PWM is 1750, the attitude is normal, but the UAV falls.
hosein_gh
March 14, 2020, 8:49am
2
i don’t think the main reason of crash was GPS glitch in your log HDOP and NSats is OK
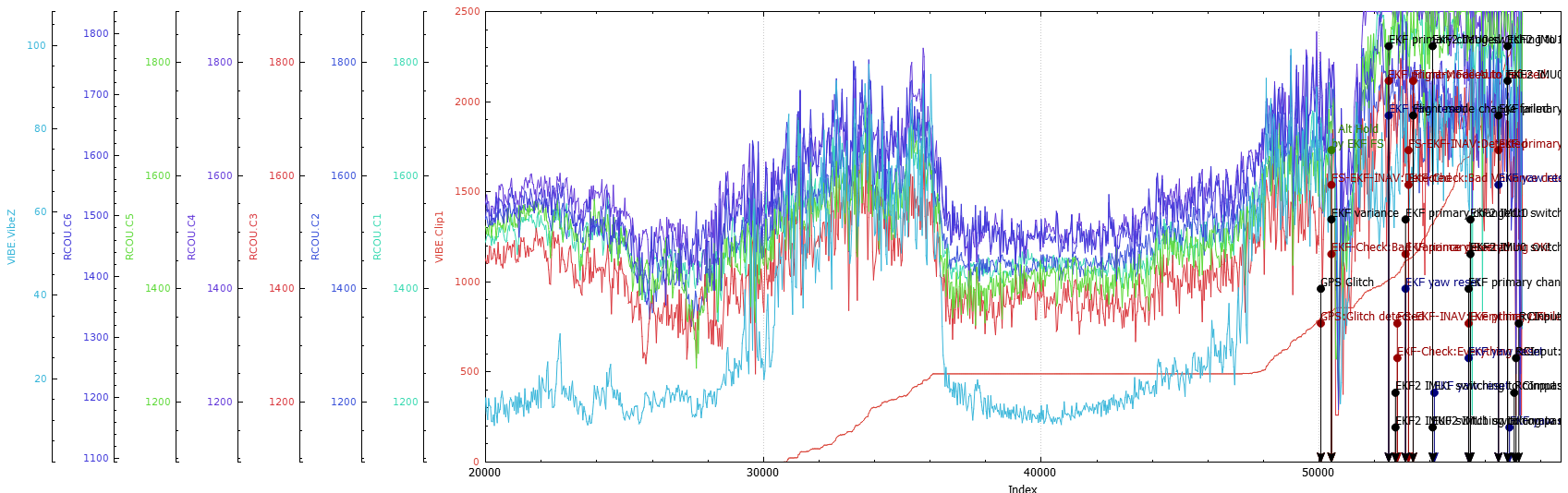
but every time when motors goes working harder (maybe against strong wind or break and change waypoint) the Z vibration increase till 80! with clipping
high z vibration will affect EKF measurement and could cause crash
GKbytes
April 2, 2020, 1:11am
3
I think some motors have stopped, at least two. And our drone itself is very vibrating.