Hi Ricky-Yes, you got it. There is only one mode on this craft at the motor RPM which the notch filter completely removed. These were just hovering tests to set the parameters, I haven’t thrashed it around yet to feel the results. But when Notch filters were 1st introduced I was able to tune it to a much higher degree of “control” than w/o it. I have had this mini quad for a few years now and the progression with advances in ArduCopter are truly impressive. And now after setting these parameters it’s one more level of tune to improve!
BTW-I’m also improving the tune on a 550 13" quad. That one has been flying great on Master also but I have yet to enable the latest features some of which are new today.
@dkemxr
Dave I think I am getting confused. I did a side by side compare of pre and post param files and found some differences.which lead me to some questions. I want to get this right.
M470L. Settings
INS_NOTCH_ENABLE,should it be enabled or not.Right now it appears to be enabled.
Hi Ricky-Those both look right with INS_LOG_BAT_OPT both to 2. We did the analysis already with this at 0, determined what notch parameters to set for each and now you want to log Post filter data to see how effective the changes are. The reason we are not initially using the static notch (INS_NOTCH_ENABLE) on the M690L is because the frame mode (~70Hz) was very low and a filter may not be needed for it. These craft are different so they need individual parameters settings.
After a hover flight with each we may indeed want to use the static notch on the M690L but that’s TDB.
So Dave first thank you for the input it’s appreciated.
So this is the static notch enable setting then. I think thats part of why I was confused then,so both to 0…roger that
@dkemxr@xfacta
Hey guys.
Got the Align M470L off the ground today. No luck with the M690L…I need to check it out later today. I get the impression it’s electrical…So will have a look.
Now the 470 got off the ground and here are my observations.
First at throttle up there is a weird vibration… I have to punch it to get it off the ground …she takes off straight up with no issues if done that way.
Second I put the quad into Poshold to give that 1 minute alt hold test and she started to toilet bowl…thats new.
I landed it after the 1 minutes and pulled the battery.
I tried again and after letting the gps sit powered on longer I took off and got airborne…put it into Poshold and it held position. When I tried to move teh machine she stopped at the new position and toilet bowled…very strange. Will check the compass calibration as soon as I get a chance.
The last flight she was in a hover…I watched the status led suddenly go red blinking, then yellow then back to green.
After that I landed it.
Logs are here
The Notch filters are doing a great job! I would make these changes to tweak the static notch and probbaly call it good but another flight and review would confirm it.
INS_NOTCH_ATT 30
INS_NOTCH_BW 25
Thank you Dave. I will make the needed change.
Would yo mind having a look and seeing if you can see a reason in the last flight for the status change. It appeared to drop out the GPS…but the logs make no sense to me.
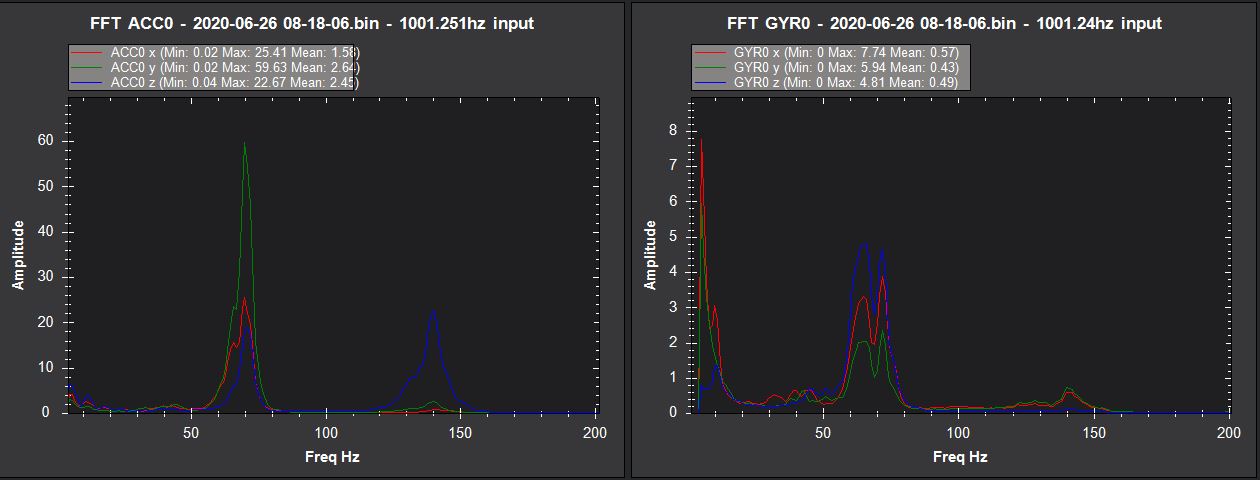
Also on those graphs. What am I looking at. I still see a bunch of stuff on them…but your saying their good. I dont’ doubt you…just don’t know what I am looking at.
Wait a mo…I just noticed the scale is drastically changed on the right graph…wow thats a huge difference. I guess once I sort out the compass it’s time to do an Auto Tune.
Yes, you got it Ricky. As you stated look at the relative difference in magnitude from pre-filter data to post filter data. This may be about as good as it will get but the tweak to the static notch might help a bit for the frame mode.
For log -06 nothing sticks out as being a problem. Is that the right log to look at?
I think this is the log.
Honestly not sure exactly how to tell. But it was the longest of the flights and this is the largest of the files.
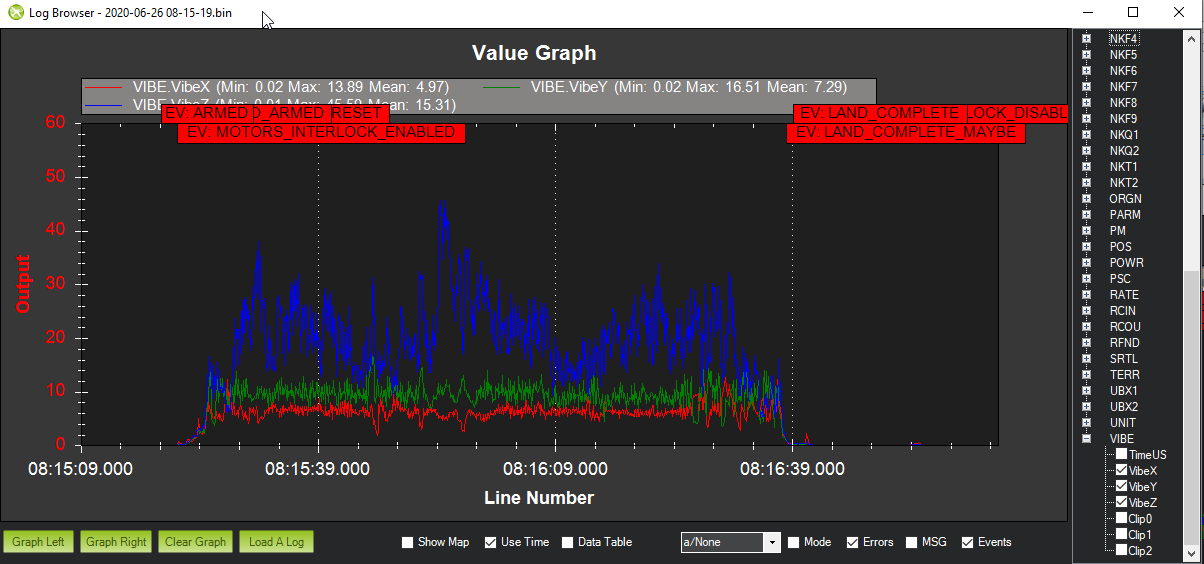
2020-06-26 08-18-06
Cool thanks man.
I found the electrical issue with the hexa,…just a connection to the I2C hub not set right. Wasn’t powering the Lidar and so would not arm. No biggy. Its going to the field this weekend. Hope to get them both in the air.
Roll vs Desired Roll is close, and Yaw seems good too. Pitch could be a little better - there’s a bit of deviation there. Nothing drastic though. Autotune should fix this up.
I couldnt really see the shaking or vibration before lift off, but Y vibrations are a little higher than X which I think is strange but maybe OK. Z vibes are still high if you ask me. Notch filtering will help of course but I think there’s still a slight physical issue.
GPS altitude is drifting a bit compared to baro.
In the log I looked at, 2020-06-26 08-18-06, you didnt really get high enough up off the ground very much to get out of ground-effect and into better GPS signal.
If GPS gives you trouble, try GPS_GNSS_MODE,67 or 11 and see if that helps.
Current monitoring is not working.
If you fix that up you can do the compass/motor calibration.
Also set BATT_FS_CRT_ACT,1
Ok so sounds like the tune is pretty good except for pitch…so i can see if there is a low wind day coming up to give that tune a try.
So refresh my memory…Y vibrations are front to back… So perhaps I need to add some weight to the flight controller itself to slow down its shaking.
I did keep it low…when I first fly them I keep them low in case things go boom. But this has been flying pretty well so I will get her up a bit higher next time.
As for the GPS…your suggesting to use GPS+GLONASS+SBAS
As for the current sense…will have a look into whats up with it.
Will set BATT_FS_CRT_ACT,1
Ok so this morning I updated the settings with your input Dave @dkemxr
Shawn @xfacta I up dated with your input as well.
Also had a look at the current sensor, not convinced its working right yet but I was getting a current measurement on the bench.
I redid the compass calibration so I hope that solves the toilet bowling.
Also I replaced the Fc mount with Kyosho Zeal mount and so will see if that helps. I mentioned the weird vibration that happens at low RPM prior to take off. I had seen it before and it was the FC mount. The vibration would cause the fc to tilt and the fc would compensate with motor changes and make it worse… Also you pointed out the weird Y and Z vibration. So it’s swapped it out and I have tossed it in the trash so I am not tempted to use it again.
Also changing up the props with a set of good T Motors that came yesterday.
Hopefully I can get another flight in tomorrow, will report back with a new log. Thanks everyone for your input.
Good morning Boyz.
Got both birds airborne today.
Logs are here
I appreciate you looking at them.
Ovbservations
M470L…despite changing the props and FC mount I still get this weird ocsillation when on teh ground. It happens just as it’s throttling up…if I hold it just around 15% throttle it shakes like made…no clue that it is at this point.
I got it into the air for a minute…then landed and battery out. I had no issues with Poshold this time. I guess the compass calibration made a difference.
I did get a GPS drop out but that was early on in the flight…while still on the ground. I have other quads that do that.I typically disarm and wait a second and then its good.
There is a funny growl sound I heard come from it in the air. I was moving it faster down the field into the wind. But apart from that it flew well. I will see about doing an auto tune soon Just need a calm day.
M690L
Take off needs a bit of throttle. She tends to drift to the left if watching from behind. I could not trim it out. That said there was a 16KM wind from the right…this place is WINDY.
The machine flies sloppy. I have no confidence in it. I think it really needs a tune. So any advice on getting some of the slop out before a tune would be appreciated.
I did notice that the external LED was intermittent…Must be a connection issue.
Apart from that I had no issues. I did nose it over once on landing. Again its sloppy to control and the landing wasn’t nailed to say the least.
Hi Ricky,
( I have to admit I haven’t been closely reading this thread, so not sure if I’ll be helpful… But have a slow morning and time to read the forums today, so…)
I’d say the 15% throttle shaking is a resonance between that particular prop frequency and the frame. Something maybe only stiffer arms could help. Maybe try getting an FFT log of keeping the throttle there for some seconds (as long as you’re comfortable doing it), and see if it’s something you can target w/ a notch. But, I’d guess it’s frame flex.
GPS drop out is normal (at least for me in my area).
Growl sound, I think I know what you mean and I don’t know for sure. (I’ve heard a lot of odd sounds from various copters). Possible it’s simply an audio effect of hearing similar frequencies overlap (beat frequency). Or could be something w/ the tune or filters. Basically the motors amplifying high frequency noise. Someone might be able to figure this out by looking at your logs.
The sloppy tune, almost always needs higher P term. You might need to raise D a little bit after you add P.
Wind has a much greater affect on bigger vehicles, so that likely does explain the left drift when you were testing this copter.
haha…I wish my Sunday was a slow one. lol. The boss says we are going for a Sunday drive. lol.
I agree with you on the shaking. It’s some form of harmonic is my impression. The arms are super stiff so I don’t think its arm flex…however I can see the gear wobble when it occurs…which surprises me as they are pretty robust.
I will check for flex. I have tried various props with no affect. But I can try to spin it up and leave it at the wobble for a prolonged period. I think its reasonably safe to do so.I just don’t like it as I don’t want something odd to happen. But will do it next time I am out.
The growl…ya same thinking. I have nearly no airtime on the frame so no idea if the sounds is normal or not. It might just be how it sounds.
As for the sloppy…any suggestions on the values to set. I agree that the wind is likely playing hell with the bird when she gets off the ground…but the slop doesn’t help. She just lumbers around and I confess makes me uncomfortable.
Thank you for your input. It’s greatly appreciated.