Here is my config after all the changes that where suggested.
Feel free to spot check it.
I won’t be back to the field for a couple days yet…the boss has me doing stuff around the house. lol
m470l 06-17-2020a.param (17.9 KB)
1 Like
The notch filter parameters look good for testing Ricky.
1 Like
thanks man
I appreciate all your help
1 Like
How do you think it felt? Are you more confident in the aircraft? Genuinely interested to hear. I’ll check the log later.
1 Like
Hey Shawn.\I didn’t get to go. The boss tasked me with other stuff. Sigh.
But I do have a question. I have a second drone that was built around the same time as the one you have had a look at. I did a side by side comparison on the param’s and see a number of them in the one yo looked at that appear to not exist in the other. I am puzzled as to why.
These are whats missing.
ADSB_ENABLE,0
AVD_ENABLE,0
BCN_ALT,0
BCN_LATITUDE,0
BCN_LONGITUDE,0
BCN_ORIENT_YAW,0
BCN_TYPE,0
FHLD_BRAKE_RATE,8
FHLD_FILT_HZ,5
FHLD_FLOW_MAX,0.6
FHLD_QUAL_MIN,10
FHLD_XY_FILT_HZ,5
FHLD_XY_I,0.3
FHLD_XY_IMAX,3000
FHLD_XY_P,0.2
FOLL_ENABLE,0
GND_PROBE_EXT,0
GRIP_ENABLE,0
NTF_OREO_THEME,0
OA_TYPE,0
RPM_MAX,100000
RPM_MIN,10
RPM_MIN_QUAL,0.5
RPM_PIN,54
RPM_SCALING,1
RPM_TYPE,0
RPM2_PIN,-1
RPM2_SCALING,1
RPM2_TYPE,0
SCR_ENABLE,0
SID_AXIS,0
SPRAY_ENABLE,0
VISO_ORIENT,0
VISO_POS_X,0
VISO_POS_Y,0
VISO_POS_Z,0
VISO_TYPE,0
@xfacta
@dkemxr
Here are todays logs.
So I flew two birds and basically follwed the same protocol for each.
Weather was hot and sunny, 24 C wiht a good stiff breeze.
I flew two birds. My M470L which yo both looked at the logs from before, if yo would be so kind as to have a look again. One observation is that at low throttle on the ground I got a weird shake. Didn’t have this last time…
Apart from that she flew fine. However I put it into poshold and found it held altitude very well…lidar helps but she did drift in the wind around a meter or so,
The second machine seems still seems a bit tail heavy… Will have to look into that. She got off the ground nicely…a little bit more throttle then I would have liked. Its carrying a 16000 mah battery that weighs a ton.
I popped it into Poshold and it was a lot more ridgid in it’s hold but also a lot twitchier then the 470. It also flies what I think is sloppy.
Let me know what if anything you see and thanks again.
1 Like
Hi Ricky-I gave you some bum info with the INS_LOG_BAT_OPTION parameter. At this stage of tuning it should be 0 not 1 as I told you earlier. When I looked at the FFT from the log I wondered why the accel was logging at 4KHz and the Gyro at 8kHz and this explains it. It’s easy enough to scale the graphs to a lower range but I’m not sure the data is valid doing that. @andyp1per would know. For example here is the FFT scaled to 300Hz max. If the data is useable with these rates then you would want to set your notch filter differently than you have it and probably use the Static Notch also.
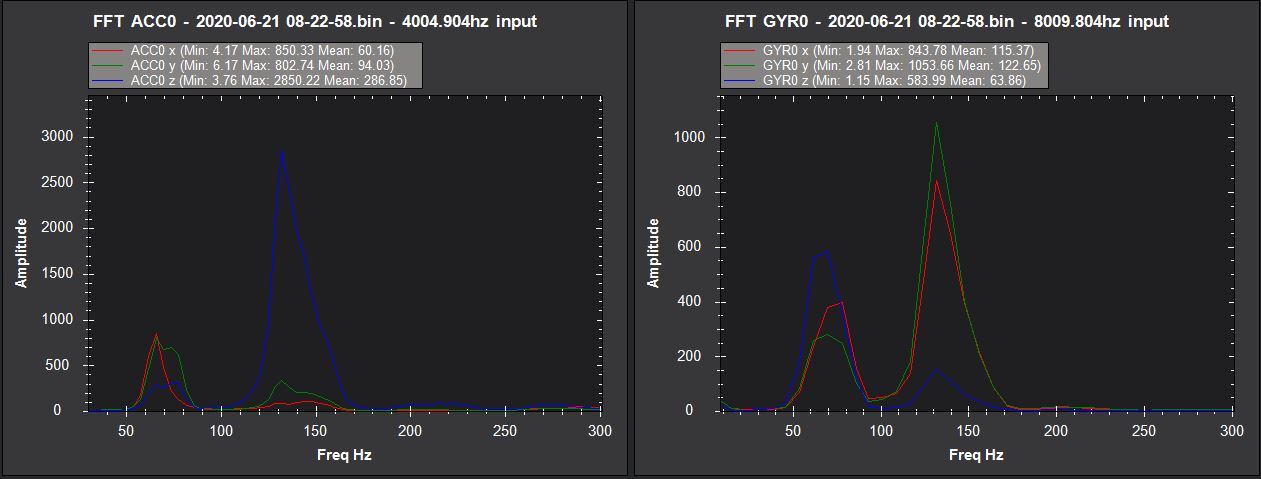
So in summary, sorry for the wrong parameter value and I’m not we can use the data from this log to set the notch filters.
1 Like
The values are valid - just not averaged over multiple samples
OK, thanks Andy. Add more characters.
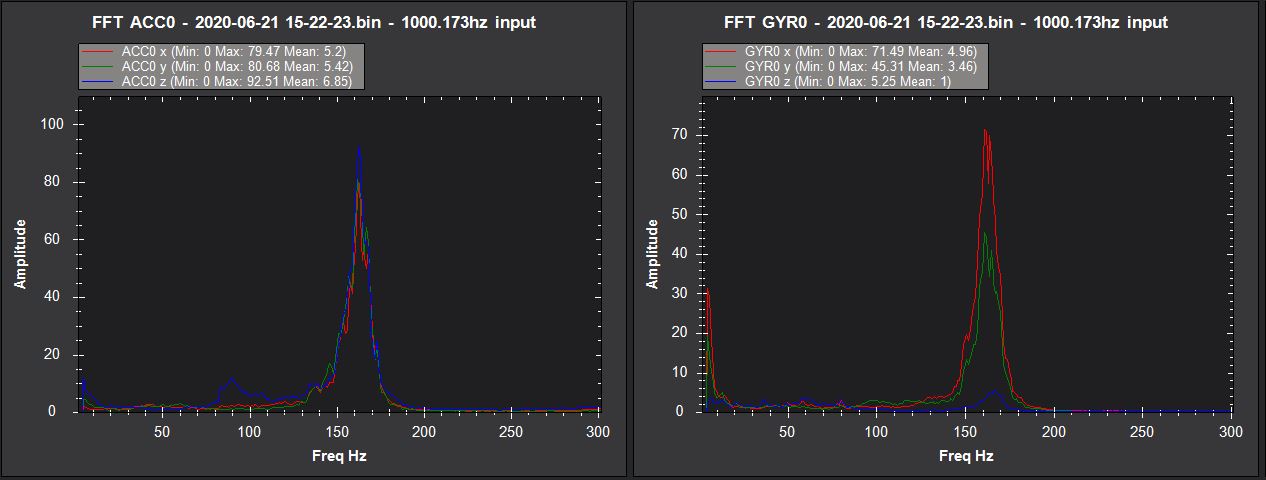
A new post now that we know the log data is useable for notch configuration. Try these Ricky:
INS_HNTCH_ATT, 40 (ignore warning about parameter value)
INS_HNTCH_BW,60
INS_HNTCH_FREQ,132
INS_HNTCH_REF,0.211
Static notch:
INS_NOTCH_ENABLE (then refresh parameters)
INS_NOTCH_ATT 20
INS_NOTCH_BW 20
INS_NOTCH_FREQ 70
Then set INS_LOG_OPT to 2 and make another AltHold Hover flight to see how effective the configuration is.
1 Like
Dave I assume this is for the M470L quad copter. I will make the same change to the hexa as its based on the quad…same frame just two more motors. Also if yo see anything it it let me know.
Yes, the M470L but I wouldn’t use the same notch parameters for the M690L the vibe spectrum is different. The notch frequency on that craft would be 150Hz (NS_HNTCH_FREQ,150) . And start by disabling the static notch (INS_NOTCH_ENABLE, 0) it may not be needed. Keep the other parameters for now and again change INS_LOG_OPT to 2 and make anothet hover flight.
1 Like
So on the M690L set the following
NS_HNTCH_FREQ,150
INS_NOTCH_ENABLE, 0
INS_LOG_OPT,2
On the M470L Set the following
INS_HNTCH_ATT,40
INS_HNTCH_BW,60
INS_HNTCH_FREQ,132
INS_HNTCH_REF,0.211
INS_NOTCH_ENABLE
INS_NOTCH_ATT 20
INS_NOTCH_BW 20
INS_NOTCH_FREQ 70
INS_LOG_OPT,2
1 Like
Also these on the M690L (same as M470L). The M470L looks good.
INS_HNTCH_ATT,40
INS_HNTCH_BW,60
INS_HNTCH_REF,0.211
1 Like
so these settings…gotcha
NS_HNTCH_FREQ,150
INS_NOTCH_ENABLE, 0
INS_LOG_OPT,2
INS_HNTCH_ATT,40
INS_HNTCH_BW,60
INS_HNTCH_REF,0.211
@dkemxr Thanks Dave.
1 Like
Right Ricky. Then we’ll see if you need a fine adjustment or add the static notch for that craft. The peak for that (~70Hz) was low but after applying the dynamic notch it might make a higher relative appearance. Fun stuff ![]() I’m doing a bit of filter tuning myself today.
I’m doing a bit of filter tuning myself today.
1 Like
Thanks Dave. Good luck with your tuning
It tuned incredibly well on the 5" Pixracer quad. This is with 4.1.0-dev, EKF3 only, Dynamic FFT based notch with the Dynamic Harmonic option (some stuff only in master). I didn’t think this craft could get much better but I can probably tune it even tighter now!
Pre:
Post:
1 Like
Very nice Dave  , I wish I had the guts to run on Master… but I guess I simply have to wait for all those goodies
, I wish I had the guts to run on Master… but I guess I simply have to wait for all those goodies
I wanted to have my neopixels led strip To show the status with 32 leds but the ntf pixel count didn’t make it to the beta yet
1 Like
Dave.
Sorry but your going to have to translate for me. I think I get what your showing me…top graph bad bottom graphs good. IF this is the case…then holy crapoly…what a change. Now for the important question. Do yo feel or see a change in craft behavior.
Thats what really counts in mu books.