I don’t know your current PID’s. I’m not on my flight computer w/ log analysis or anything…
But, in general, I’d say just go up a point or two at a time. If you’re on .08, I’d go to .09. If you’re on .13, I’d go to .15. And if it doesn’t get worse, or seem to oscillate on the ground, maybe go higher. PID’s being too low is weird… Sloppy, sometimes oscillates, random movements, all sorts of odd behavior. Too high is pretty clear. It will oscillate quickly, either as soon as you give it any power, or once you get to a certain throttle.
Hey, I thought of one more possibility for your low throttle oscillations. When my mot_thst_expo was pretty far from where it should be, I would get low throttle oscillations like that. Both on the ground, and when lowering throttle quite low to descend while flying.
But like my last answer, I can’t really tell you what to use. Technically you should take measurements to set it properly. But I have been successful just trying different settings. If you’re at .6, try .5 and .7 to see how it performs.
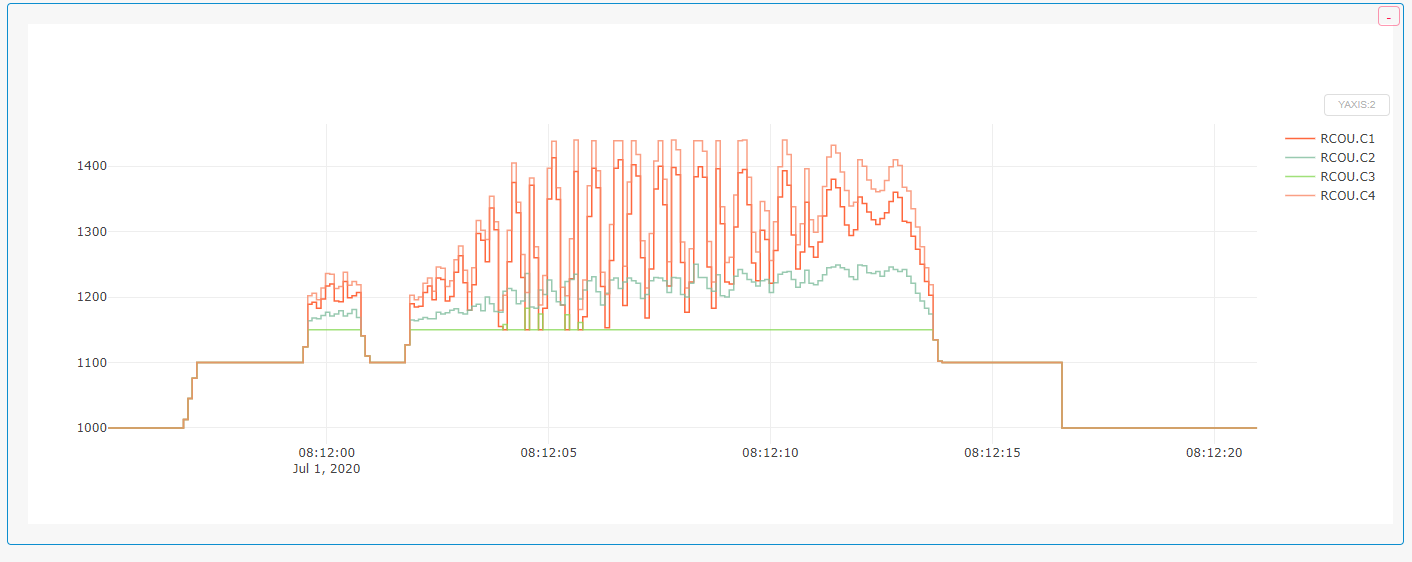
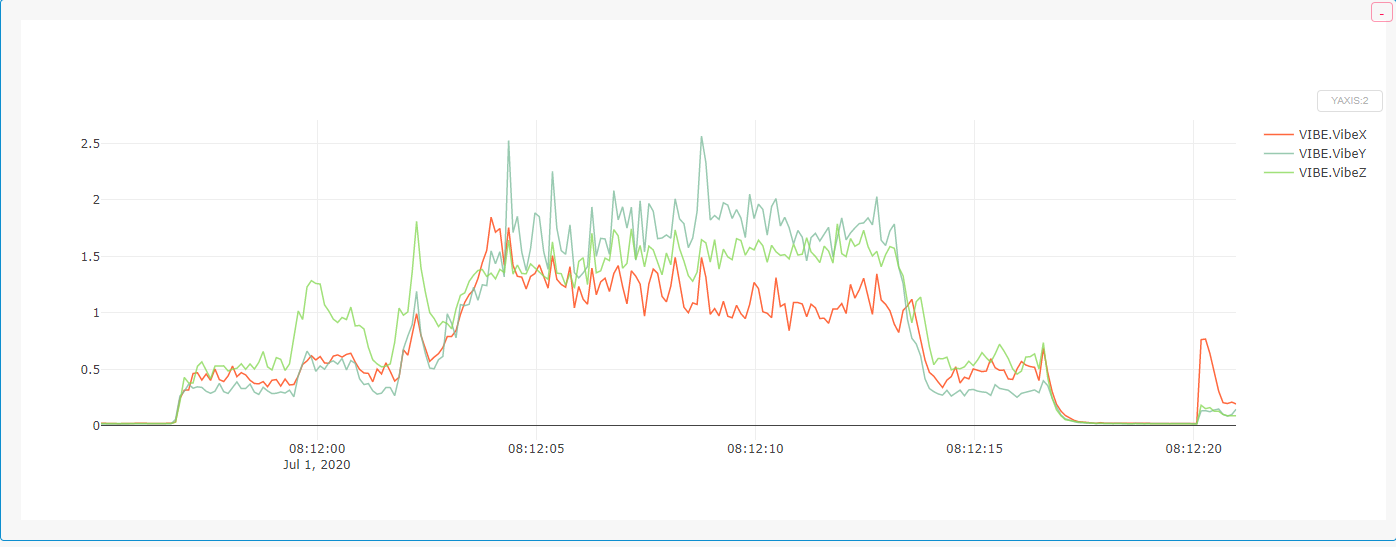
Great improvements on the vibes in the above graphs!
Hi there.
I checked my Mot_Thrust_Expo and it’s .7. I cn lower it down some to see if that helps. But I don’t understand why it would cause any oscillation.
It changes the amount of throttle it puts into the PID loop (or something like that… I don’t know exactly).
But in effect, it’s like either raising your low throttle PID’s and decreasing your high throttle PID’s if you go one way, or the opposite if you go the other way.
So in my case, I think I was actually getting too low of PID’s at low throttle, and was getting the slow, loss of control oscillations when lowering the throttle. Changing the curve, so it gives more thrust at low throttle and less at full throttle fixed the issues I was having.
haha thanks Andy.
Yes I was reading the documentation on it since @wicked1 pointed it out. What I don’t understand is why it would cause the oscillation at 15% throttle. Is it to much throttle for the pid values in play.
I also was given the suggestion of tuning down to the following.
ATC_ACCEL_P_MAX,60000
ATC_ACCEL_R_MAX,60000
ATC_ACCEL_Y_MAX,16000
Right now they are 81200, 81200 and 23400.
Also my Mot_Thrust_Expo is .70…am I going up or down with the value. I think 0 is a flat curve and 1 is a rounded curve…so I am guessing I would lower the value.
Hi all.
I got out today to give her a test again.
Observations for the Align M470L
I reduced the Mot_Thrust_Expo to .5 and then spooled it up 10 to 15% Still the strange oscillation.
So then I tried to reduce the PIDS as suggested.
ATC_ACCEL_P_MAX,60000
ATC_ACCEL_R_MAX,60000
ATC_ACCEL_Y_MAX,16000
No change.
Now after changing the Expo I could certainly feel the difference in it’s take off. It felt like it needed a bit more to get it off the ground.
That said, I ran a number of spin ups just enough to start the wobble. I then shut it down and pulled the battery and repeated it a couple of time to get logs with that vibration. So if anyone can see something odd in the log let me know.
What I did observe was a high pitch whine that oscillated…I have gone over the frame looking for anything loose, but nothing.
I am at a lose to explain this.
That said it flies nice. I do need to run a tune on it but it does fly well.
Hi Ricky-Could you try setting the ATC_THR_MIX_MAN back to default (.1) and make a test flight? This might not do anything but I have seen this before and while troubleshooting it changed several parameters including this one back to default to track it down.
I dont’ recall ever changing it Dave.That said I will affect that change and revert the other two changes as they had no affect.
Tonight if I have a chance I will also go back over the machine and look for a physical issue that could cause it…Will check prop balance and frame tightness.
There are sources that say that after Autotune or a manual tune set this value from default to .5. Perhaps you followed that. I’m not saying it’s the wrong thing to do just that it was in the mix when I was tuning a craft and I ended up back at default.
Hey @andyp1per
What do I need to enable to have that level of logging.
Also what specific value are you referring to as being to high
I am assuming your meaning this setting which I did dial down to a lower value
ATC_ACCEL_R_MAX,81200
I had lowered it to this value
ATC_ACCEL_R_MAX,60000
With no change.
Thank you @andyp1per
I have always been more of a hardware guy then software…But made up my mind now that I have free time to focus on learning more about the firmware…so thank yo for the help and patience.
I will make the changes as you suggest and give each function a good read to understand their job.
Old
ATC_RAT_RLL_P,0.135
ATC_RAT_RLL_D,0.0036
LOG_BITMASK,176126
New
ATC_RAT_RLL_P,0.101
ATC_RAT_RLL_D,0.0027
LOG_BITMASK,397310 \
Will see what I can do to get it in the air again soon.
Good morning @andyp1per
I got to teh test field for a few minutes and tried those new pids values.
Here are my observations
The wobble is still there. However it seems to pass through the wobbly state faster. Normally the motors if you leave the throttle at a set position will tend to spin up more and more…at least a small amount. I never understood why this happens but all my machines seem to do this and I have accepted it as the norm.
IF this is wrong let me know.
Anyway the machine at 10 to 15% throttle starts the Oscillation as before, this time however that drift of speed seems to carrier it out of the wobble…or at least nearly out. It was far more difficult to maintain that wobble during this mornings test.
I have set the logging to include pids as you suggested.
It’s my hope yo see something that will make the different. The machine flies nice. I know it would benefit from a tune…but I want this bad behavior gone first.
PS she flies nice.
Oh one other observation…When I plug the battery in each mote typically takes a small movement of the propeller…not much 10 degree turn…all but one.D - number 3 motor…it doesn’t appear to move. Might be nothing but I want to share what I see.
@andyp1per
Forgive the dumb question…but I am reading from your comment that the notch filter will need to be adjusted because the noise now is a slightly different frequency…is this correct.
I will say my prayers to the weather gods to give me a windless day to AT. This new town we live in is by the water and there is always a breeze…But i was told today that if I hit the field about 6 am it’s calm…so I will set my alarm clock.
If anyone gets a chance I have a series of Hexa logs that I would love someone to give a going over. I want to get it tuned up as well. IT flies sloppy right now.