Good morning all.
I got to the field to fly again. IT was dead calm so I decided to try an auto tune.
I thought it completed successfully. But when I did a compare of the params today from a few days ago I see no change.
I started AT…then when it stopped I switched the thing to low. Then to high landed and disarmed…which should have saved the pids.
But I see no change. This AT function is different from what I am use to so if you would be so kind as to check the logs.
I see a lot of AT messages and success …but I am not familiar with this AT function to know whats happening.
I’ve had this problem. I think there is a bug, but I can’t nail it down.
Yeah your first log autotune is successful, but I don’t see the gains being saved.
@rmackay9 @Leonardthall I definitely think there is still a bug here
oh well I thought I had done something wrong. Well dang.
Is there a way to pull the pids from the log so I can adjust manually. IT would save me doing a tune on that axis again.

Hi I’m pretty confident that your pitch auto tune ended with
ATC_RAT_PIT_P=0.064048
ATC_RAT_PIT_I=0.064048
ATC_RAT_PIT_D=0.003064
ATC_ANG_PIT_P=2.304264
ATC_ANG_ACCEL_P_MAX=81200.00
1 Like
I’m looking at the message stream and see when it changes what to tune
( P ) equals pitch, this is the last attempt it changes the p and d for the pitch rate p and d.
Next it continuous with ( P ) angle P that ends with a AutoTune:success
Viewing with https://plot.dron.ee/
| 01:07:39 | AutoTune: ( P) Rate P Up |
|---|---|
| 01:07:39 | AutoTune: WFL (Angle( P )) (5.061315 > 5.000000) |
| 01:07:39 | AutoTune: p=0.064048 d=0.003064 |
| 01:07:39 | AutoTune: success 3/4 |
| 01:07:40 | AutoTune: Twitch |
| 01:07:41 | AutoTune: Twitch |
| 01:07:41 | AutoTune: ( P ) Angle P Down |
| 01:07:41 | AutoTune: TWITCHING |
| 01:07:41 | AutoTune: lean=1865.000 target=2000.000 |
| 01:07:41 | AutoTune: rotation=11.13642 target=112.0743 |
| 01:07:41 | AutoTune: p=4.500000 accel=81200.00 |
| 01:09:08 | AutoTune: ( P) Angle P Up |
|---|---|
| 01:09:08 | AutoTune: WFL (Rate( P)) (10.18336 > 10.00000) |
| 01:09:08 | AutoTune: p=2.304264 accel=81200.00 |
| 01:09:08 | AutoTune: success 3/4 |
| 01:09:08 | AutoTune: Twitch |
| 01:09:08 | AutoTune: Success |
yes I see the same thing.
Is the I term always the same as P. So ATC_RAT_PIT_I always is equal to ATC_RAT_PIT_P. I ask because I see no reference to that term in the message log. But the other values I do see reported.
1 Like
As I understood yes, have not seen any other results.
I’ve have been running roll and pitch individually, first roll, than I manually update pitch rates to the same values as roll before I run autotune on pitch and yaw together. Seems to make the calibration process of pitch to be much faster as it in most cases will be pretty similar to roll.
I have also struggled to get it to save but last time, running dev branch, the succcessful step was.
1 start in stabilized mode
2 switch to alt hold
3 turn on auto tune
4 when auto tune is done, turn off auto tune for one sec and than turn it on again. Dont change flight mode
5 land in alt hold mode
6 disarm
I’m not sure if this is a fix within 4.1 Dev or that this is a working procedure for all version
1 Like
@rickyg32 I term are always the same as the P term unless manually changed.
NOTE: step 7 in the Autotune doc which is switch AT off and back on again is un necessary and confusing. It only enables you to test old PIDs vs new especially when tuning one axis at a time. Many times you end up without saved new PIDs.
Gal
1 Like
Thank you Patrick Understood.
@gnitzan Thansk man. I suspected that the I term was the same. I had observed that in the past.
So just need some nice calm days and will do the remainder of the tunes to put an end to this thread. Then I just will need some help with my hexa and another small quad that I am upgrading to the latest and greatest.
1 Like
@Patrik_Emilsson
Hey Patrick, I punched that value in to MP and got a message it was outside the expected range. 3.00 to 12.00
is that normal.
@andyp1per
@dkemxr
@xfacta
@gnitzan
1 Like
It’s set by autotune and I wouldn’t recommend setting it higher than the value autotune gave you. Low values mean you got a bad tune and something needs fixing. A good value is around 6 or higher. You don’t want very high values on larger copters I think. On my smaller copters this gets set to 18 by autotune.
1 Like
Re-ran pitch and roll tune today.
For Roll…which is the axis I was having the vibration…It appears to be a successful tune.
the message log states. The vibration appears to be gone.
19:05:34 AutoTune: Saved gains for Roll
What I don’t understand is I see this in the log messages just before it finished
19:05:11|AutoTune: p=5.196290 accel=81200.00|
19:05:11|AutoTune: success 3/4|
19:05:12|AutoTune: Twitch|
19:05:12|AutoTune: Success|
But this value I don’t see in my param file.(p=5.196290)
Perhaps I am not…just curious.
Again same question
19:06:48|AutoTune: p=12.10510 accel=81200.00|
19:06:48|AutoTune: success 2/4|
19:06:48|AutoTune: Twitch|
19:06:49|AutoTune: Success|
19:07:11 AutoTune: Saved gains for Pitch
But this value I don’t see in my param file.(p=12.10510)
Perhaps I am not…just curious.
I can see my vibes are up…but I chipped a prop some how so one prop isn’t balanced right…new ones on the way.
These are the values I see changing from one day to the next.
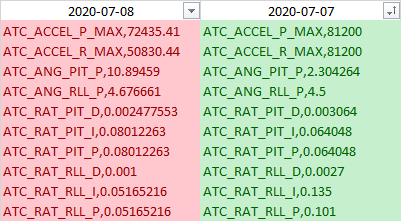
Align M470L
Autotune varies these values a lot during the tune - only the saved ones are relevant
The roll tune looks pretty good
The pitch tune does not
How can you tell the pitch tune doesn’t look good. What seems wrong with it.
I can do it again…But for you to say that there must be a reason.
1 Like
It’s the low value of ATC_ANGLE_PIT_P and the fact that your PIDs went down. Usually this is indicative of noise.
1 Like
Noise…as in the filter is off somehow.
Ok I can roll back to the previous set of pids for pitch. They seem to work fine…but then best read about setting the notch.