I think Smart RTL would have to be a Mission Command for that to work. Interestingly I recalled a “set flight mode” command in the QGC Mission Planner but when attempting to upload a mission with a command to Smart RTL mode the FC refused it.
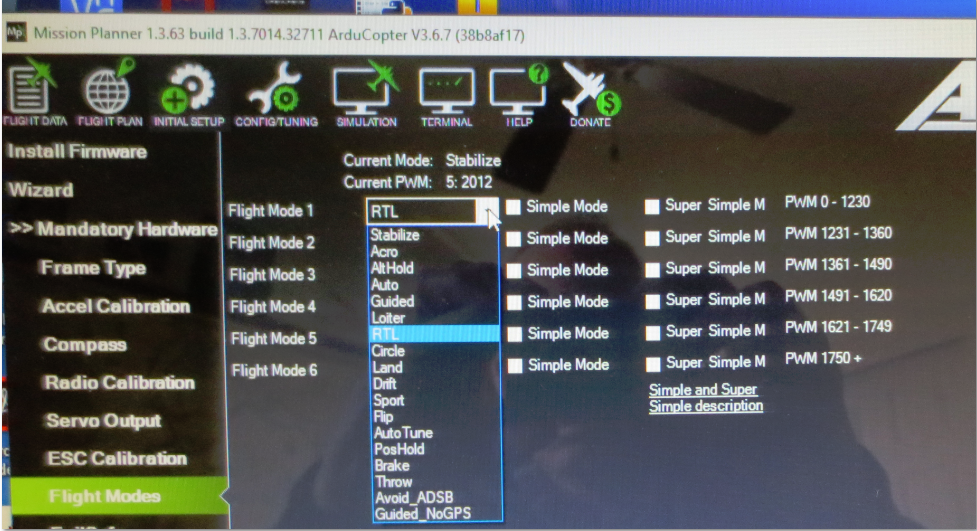
Smart RTL is supported and has been for awhile. The attached is form a PIxRacer running AC3.6.7 with Mission planner latest. Not sure why you are not seeing it.
Back to my original question: Can SRTL use an automated mission to gets its data? I suppose that there is currently no Smart RTL selection among the automated commands yet.
Performed several manual flights which came home by way of SRTL and it performed really well.
To try and simulate the SRTL flight path, I programmed an automated mission having the same headings and altitudes as my manual SRTL flights earlier. However, in several test flights the regular RTL did not accurately maintain the return heading and final altitude. I suppose I could add more waypoints to give it more positions with which to work. SRTL uses one every 2 meters!
Smart RTL seems to handle the final altitudes and headings better - if I only I could invoke SRTL from the automated mission commands.
The data is collected during a mission but the only way to trigger SRTL is manually or thru failsafe action. As I mentioned there is no mission command to activate it in a mission. You can easily replicate this in the Simulator. Run a mission and anywhere in the mission change modes to SRTL.
I ran across this discussion somewhat accidentally. I’ve created an enhancement request to add SmartRTL as a mission command. It’s not particularly difficult but I have a lot on my plate at the moment so I can’t guarantee when it will be done. It’s possible another developer may pick this up though, it’s not that difficult actually although it requires a small modification to MAVLink to define a number used for the new mission command.