Hello Together
I am currently working on a project where I want to control the motors via CAN bus.
The project is a 4 wheel steering vehicle, where 2 are driven.
My question is now, what do I have to do so that I can read signals for the motors on the CAN bus?
I have assigned the value 26 to the drives 1 to 4 and 5,6 with 70.
My parameters are:
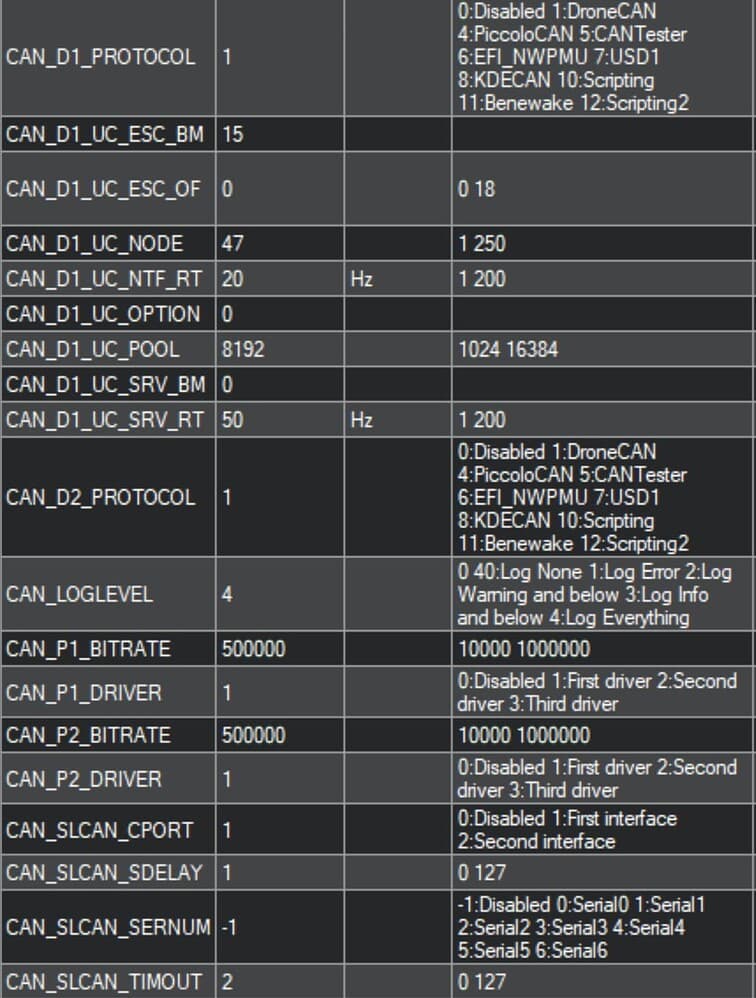
I get the following values:
