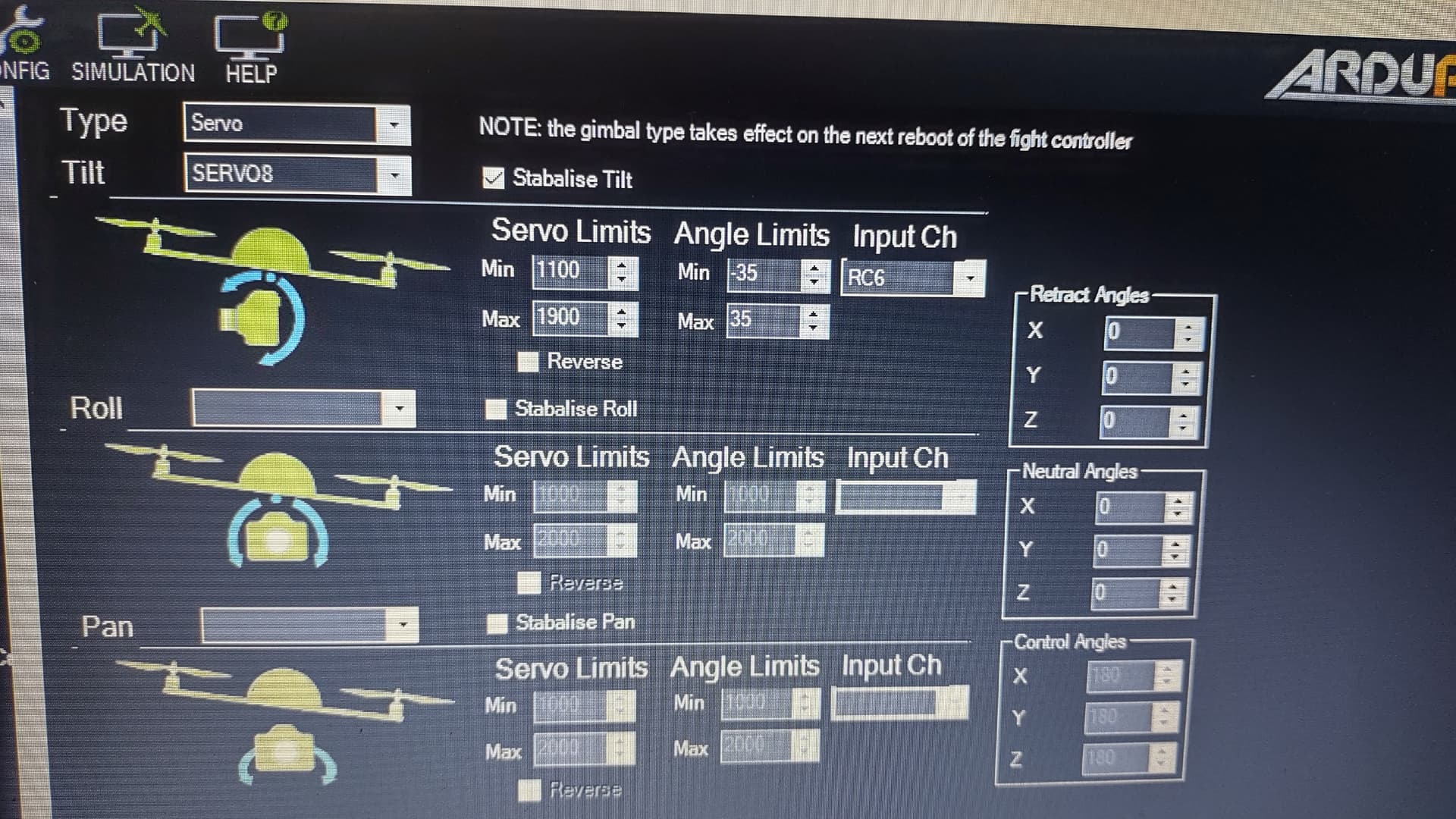
1st post. I decided to give Ardupilot a look and fell down the rabbit hole. So far I have managed to get everything working I believe by reading and re-reading the documentation and searching here. I’ve checked everywhere I can think of and still haven’t managed to get a simple pitch servo for my camera working.
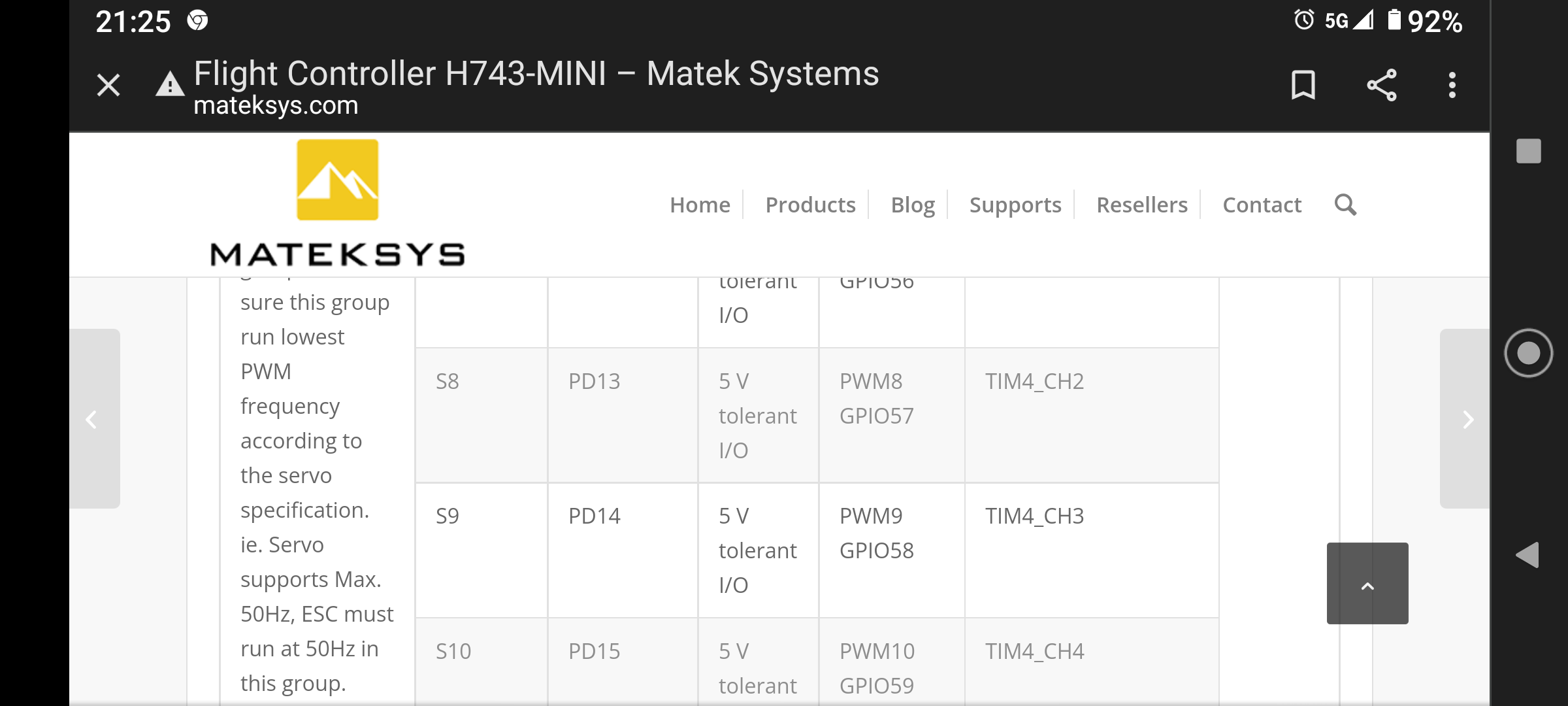
I have Copter 4.1.1 installed on a Matek H743 mini. I am using the servo shown in the pics attached to servo pwm out 8 on the Matek.
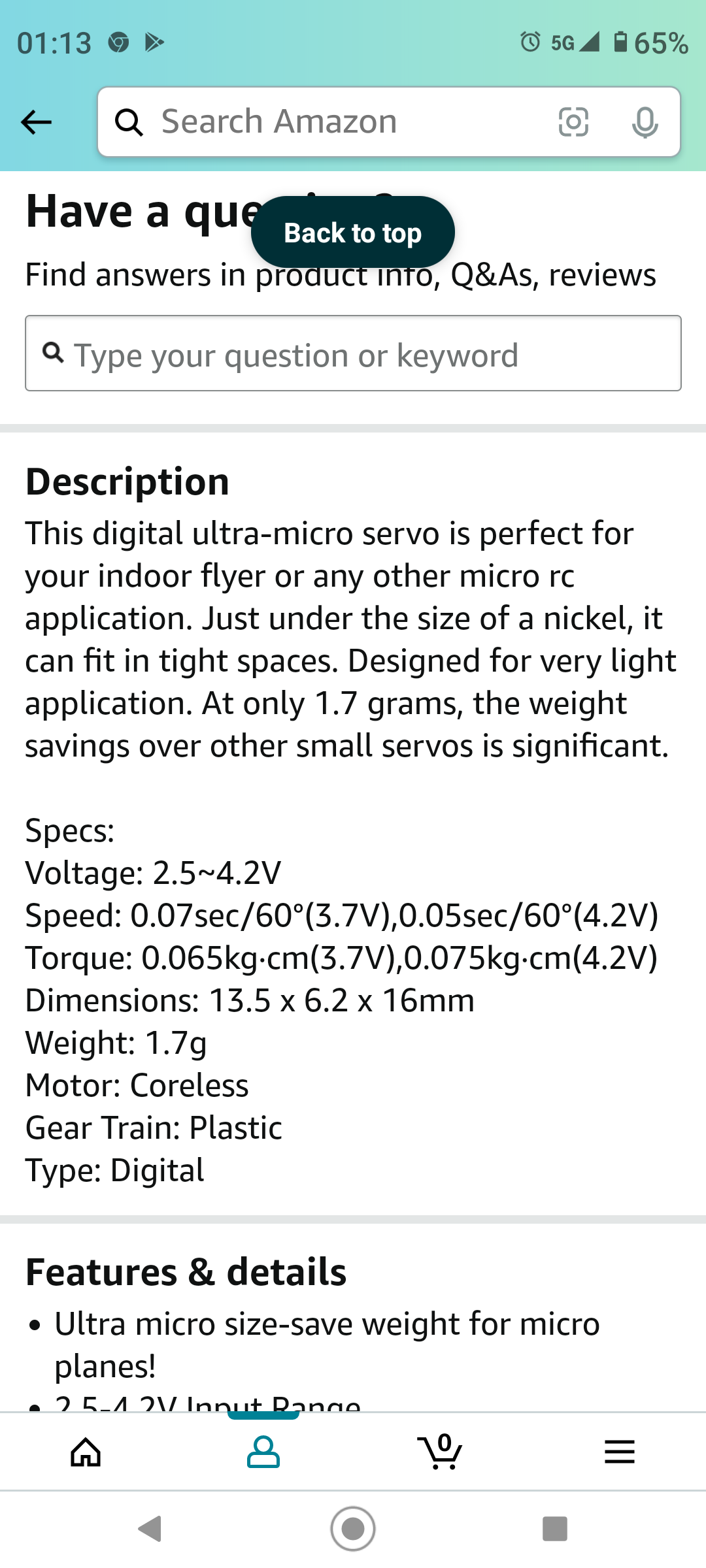
When I tilt the board or turn the pot I’ve mapped on my Taranis Q x7 (Channel 6) the servo output in MP shows movement. All I can think of is it is a digital servo and/or the timer it is on isn’t fast enough. It is on it’s own timer according to the Matek website.
Processing: VID_20211123_010457063.mp4…
Any help on this issue would be greatly appreciated. I’ve run out of options.