Hi Mike
So I have started over.
I now know that you can route a radio channel through to AUX2, SERVO10, by testing a spare Servo.
Test 1
I connected the Gimbal Tilt lead to AUX1, SERVO9. I want this controlled from Radio Channel 8 (All channels tested and working in Mission Planner Radio Calibration).
Mission Planner set up
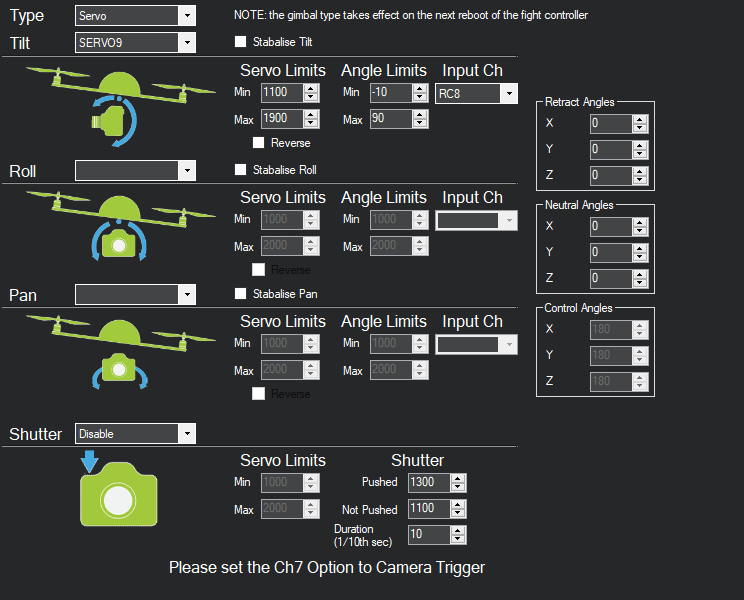
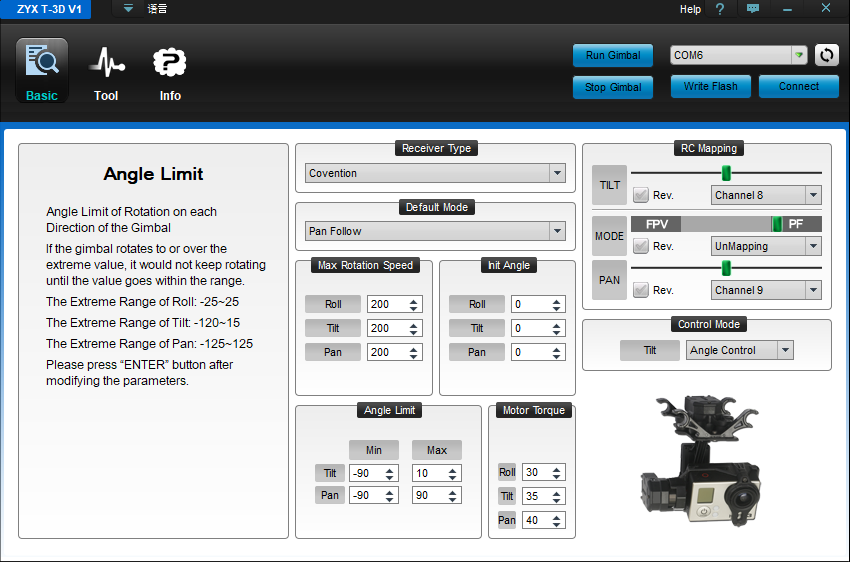
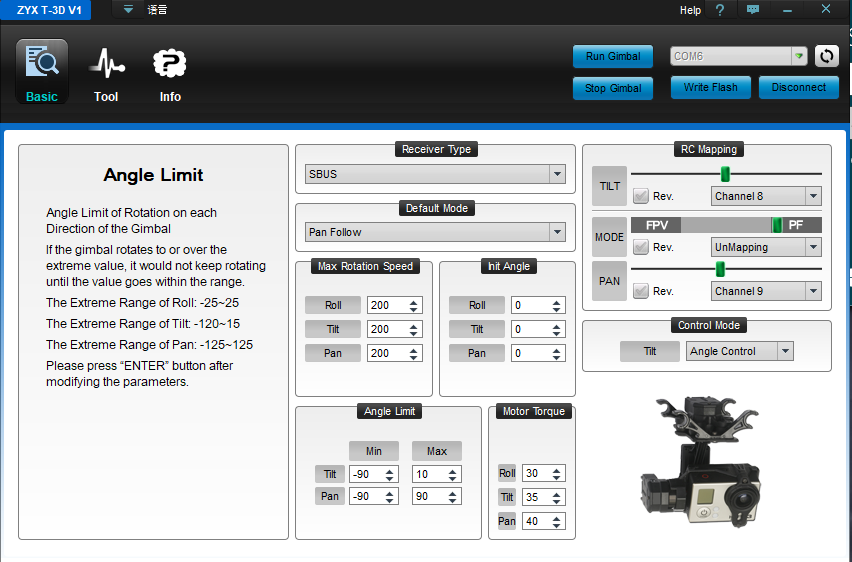
And Gimbal configuration Program set up
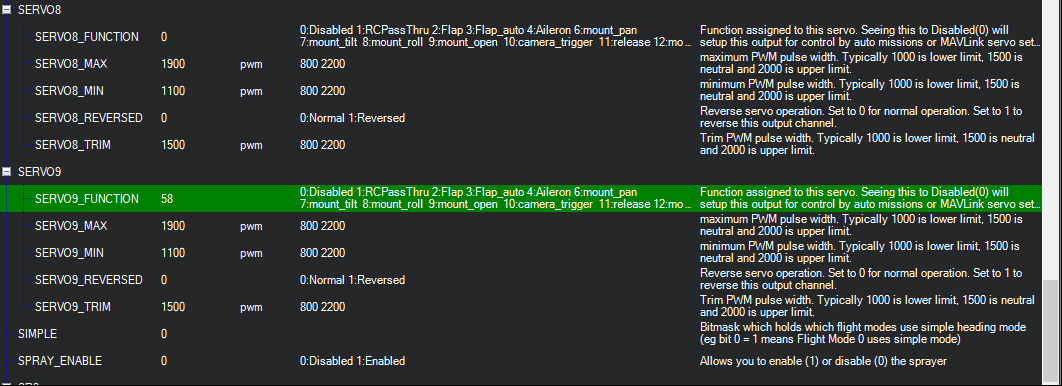
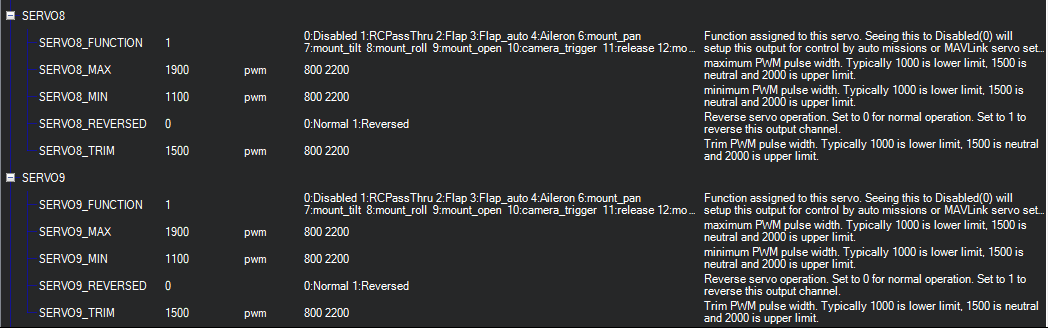
In the Full Parameter Tree
SERVO9_FUNCTION = 7, which would be correct for Tilt.
Once all powered on, USB or Via battery, nothing happens.
2nd Test
Gimbal Tilt lead still on AUX1, SERVO9
In Mission Planner, All Gimbal Values removed in Camera/Gimbal settings.
In Full parameter Tree
SERO9_FUNCTION= 58, to pass Radio channel through from Channel 8.
Same Gimbal configuration program settings.
Again once powered up, nothing happens
Third Test.
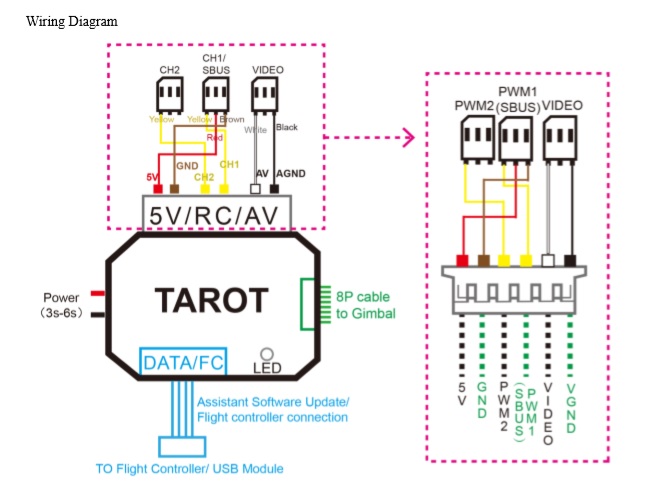
Going back to plugging the Gimbal Tilt lead in to the SBUS on the Pixhawk (This will also control the Pan function as well).
Setting up the SBUS with BRD_SBUS_OUT from 0 to 1.
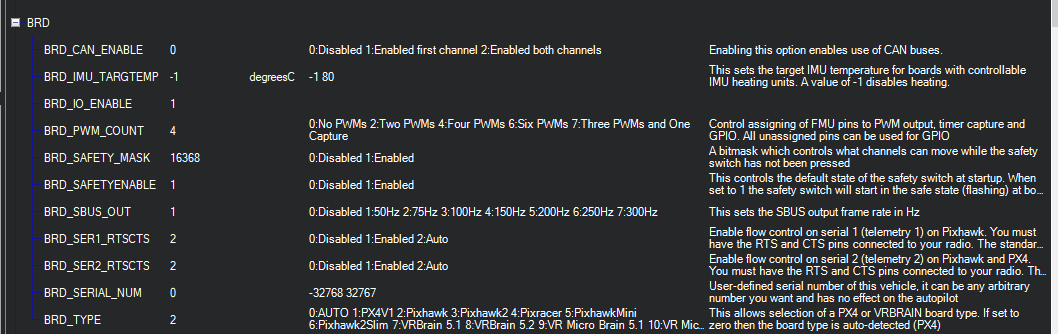
And the pass through for SERVO8 and 9_FUNCTION set to 1 from 0. (This makes no sense to me as the term SERVO is now referring to the radio channel and not an output on the Pixhawk).
Gimbal Configuration Program settings now changed for SBUS.
Once powered up this works perfectly.
I wonder if for the set ups that do not work, there is a conflict between the Mission Planner settings and those in the Gimbal configuration program?