The RS485 transceiver should require very little power. It should be safe to power the RS485 transceiver from the flight controller. It looks like there are 3.3V power outputs on the SWITCH and SPEKTRUM/DSM ports. You probably don’t need an additional 3.3V regulator.
Yes I see and good idea, thanks again!
Hi Duane,
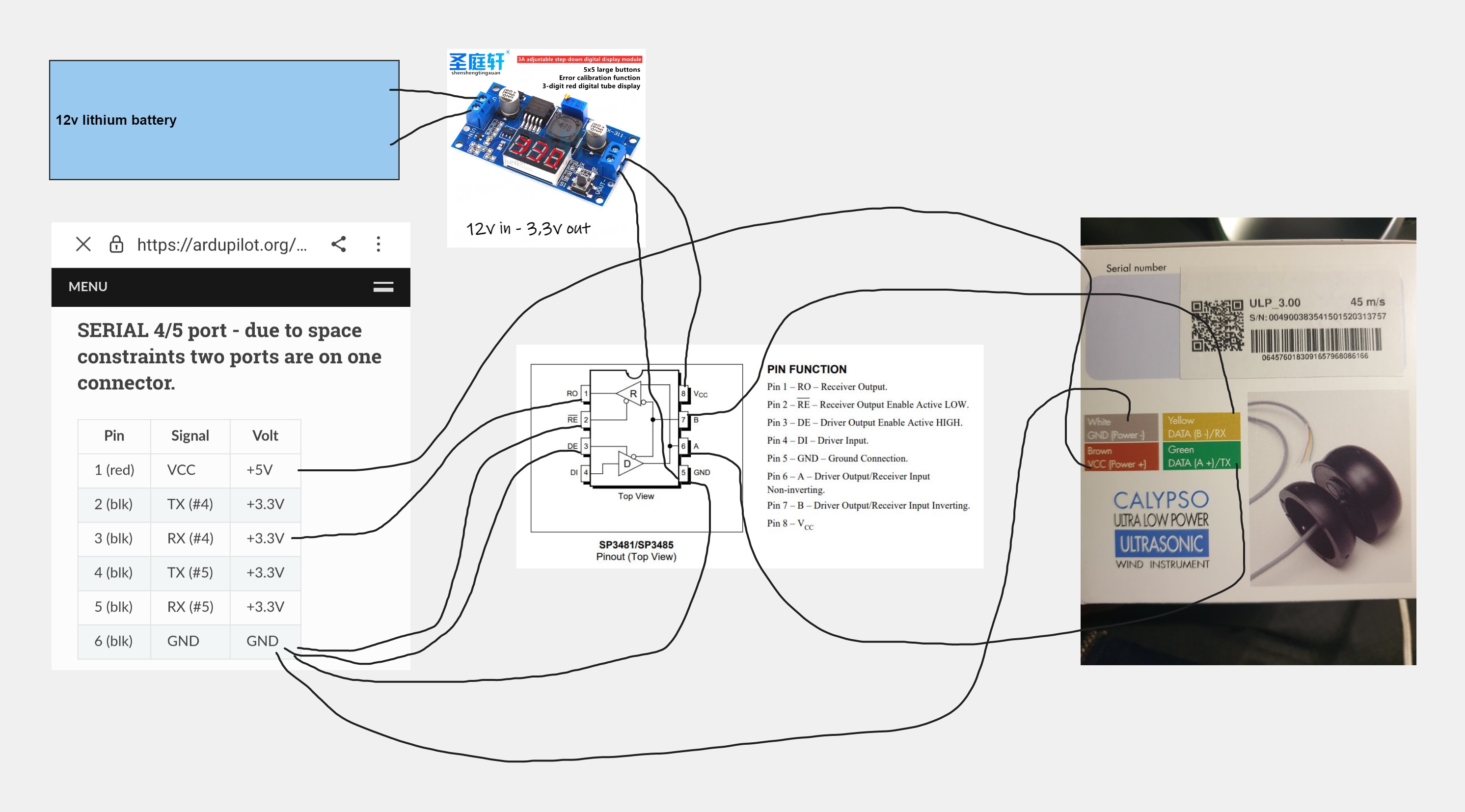
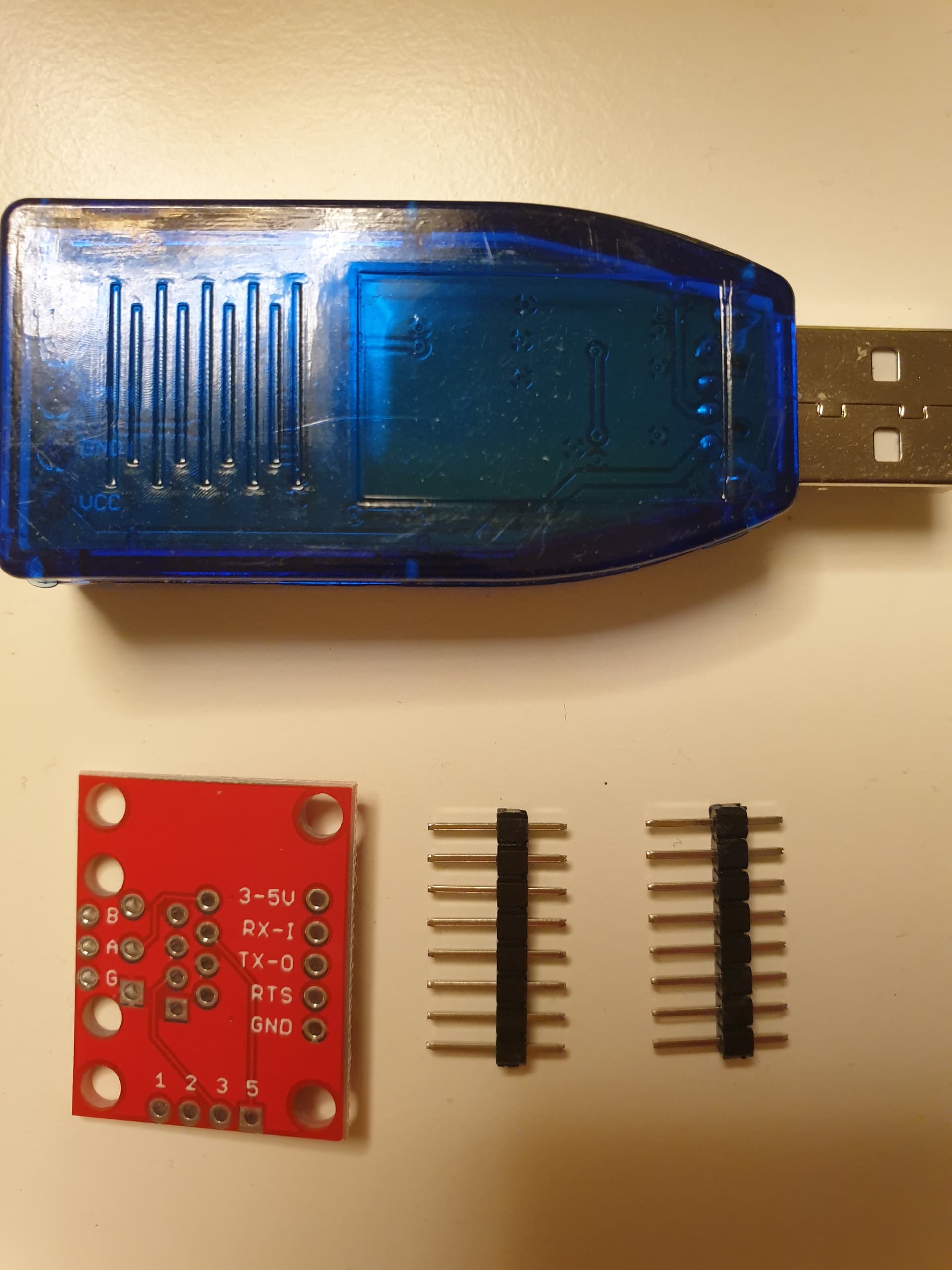
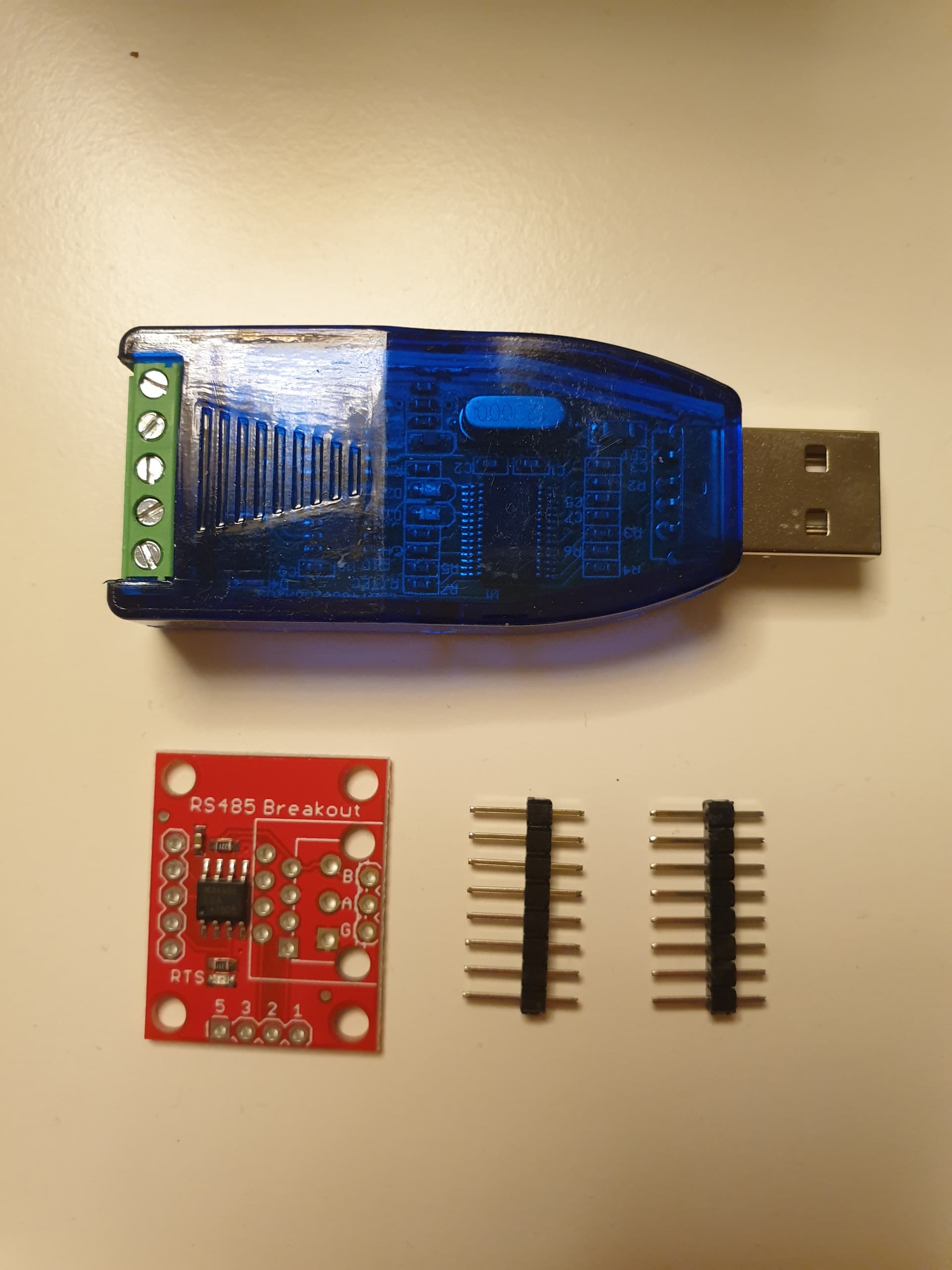
I got the parts already, can you help verify the drawing to the device pins?
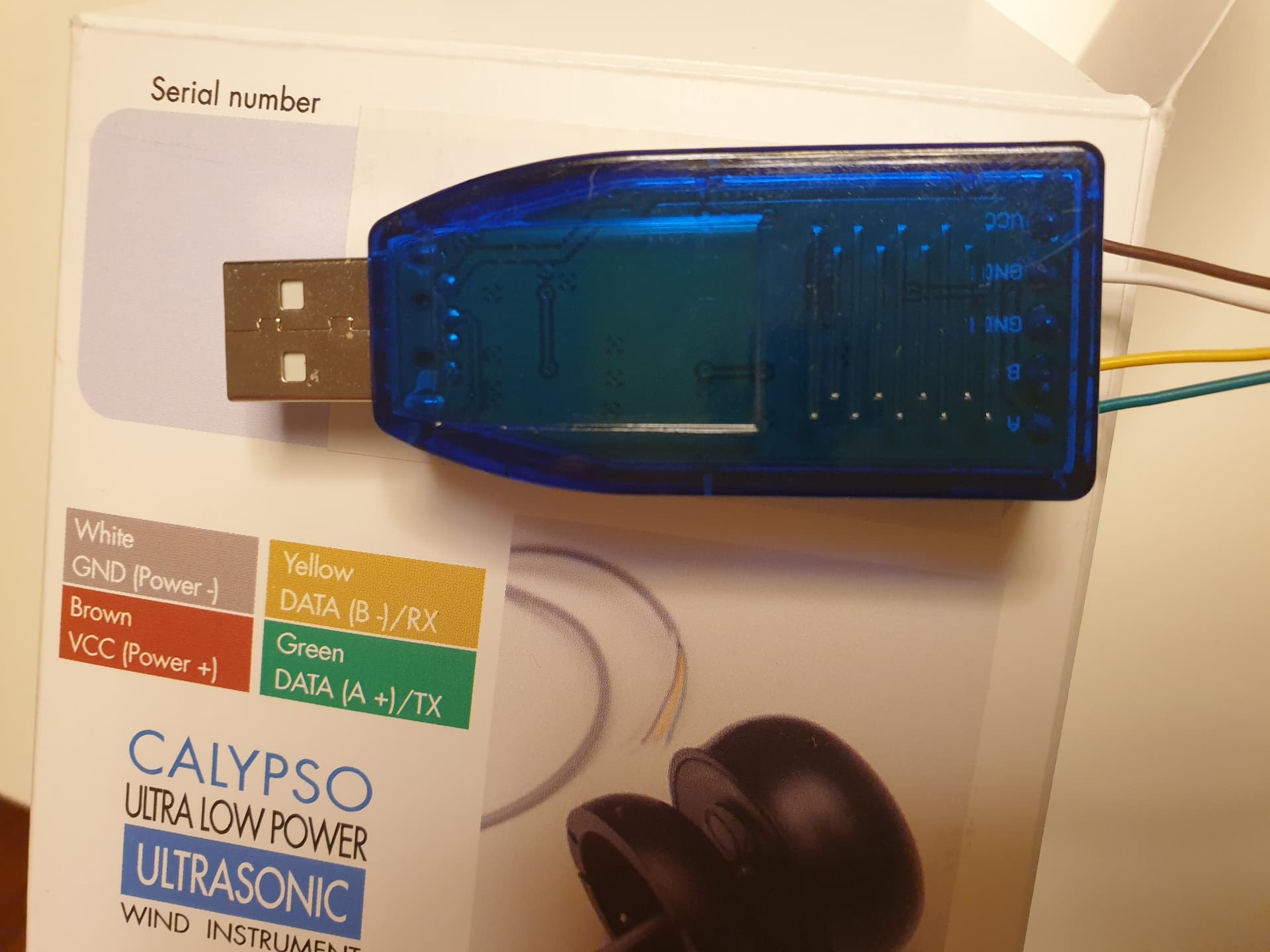
And do you suggest testing with the USB device first?
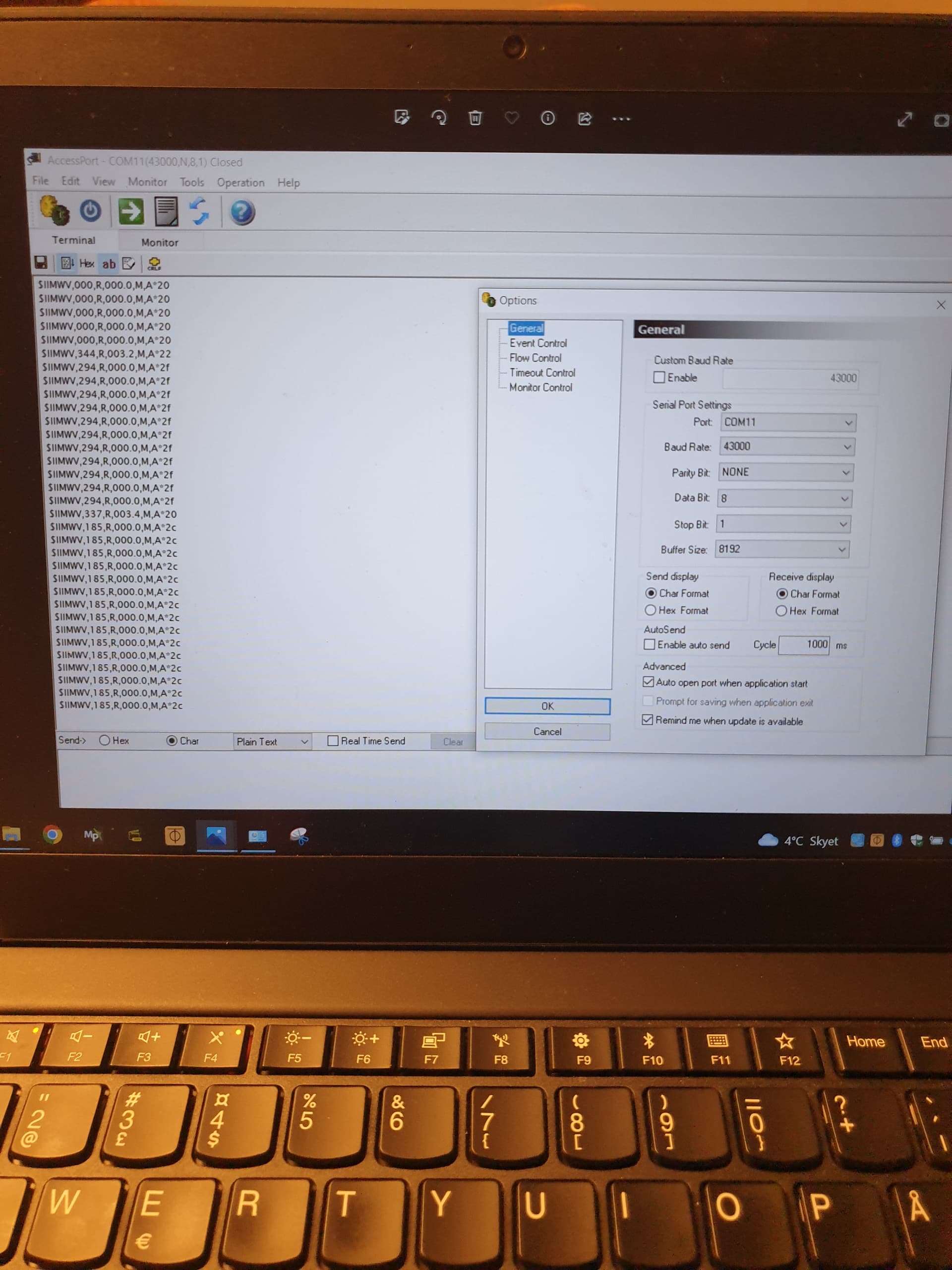
I connected the usb to the wind vane and opened a terminal program with these settings. Then I had a fan in different directions at the wind vane and here is the results: (data changed but no idea if it is good :))
3-5V to 3.3V on FC (Edit: I original wrote 5V.)
RX-I not connected (NC)
TX-O to RX on FC
RTX to GND (use either a wire of a resistor (less or equal to 10K ohm) to connect to adjacent ground pin))
GND to FC ground.
A and B connect to A and B on sensor. Be prepared to swap these lines. A and B nomenclature is not consistent across various RS485 devices.
You can leave the G position unconnected since the sensor is connected to the FC ground using the pair of power connectors.
You want your parts to share a common ground, but you want your parts to have ONLY one ground connection each. You don’t want a “ground loop.” Connect the sensor’s ground to the ground connection closest to the where the sensor is receiving its power.
That data sure looks promising. It sure looks like your sensor is working correctly (or at least it appears to be spitting out data). The sensor’s datasheet will tell you which each field means but you don’t really need to do this since the ArduPilot driver should be able to parse the data for you.
Assuming ArduPilot is configured correctly, the sensor should work with your controller. I don’t know enough about ArduPilot to help with the configuration.
Edit: The power to the RS485 board should match the logic level expected by the flight controller. Reading back in this thread, I see I suggested a 3.3V power source earlier.
I want to make sure you see my correction about the 3.3V power to the RS485 board.
![]() I will wire everything up in the coming days and test. I am waiting for the sail winch servo in the mail but will test with a normal steering servo to see if the Pixhawk/ardupilot will adjust the servo depending on wind direction input to the wind vane… I will update here as soon as I have more to share.
I will wire everything up in the coming days and test. I am waiting for the sail winch servo in the mail but will test with a normal steering servo to see if the Pixhawk/ardupilot will adjust the servo depending on wind direction input to the wind vane… I will update here as soon as I have more to share.
Big thank you for all the help so far, it is really appreciated!