root/admin as previously stated
duh!!..stupid me…missed that one 
I should add that I now have a Raspberry Pi Zero W mounted as a companion computer, via the USB interface and powered from the drone itself. This provides simple automatic uploading of missions (the drone loses the current uploaded mission on power cycles) and capture of full telemetry (the drone’s firmware is not built to create dataflash logs). Connection to Mission Planner, QGC, etc. also goes through the Zero W, either via Wi-Fi or standard telemetry radio.
Interesting. What is the new takeoff weight? Does it affect the flight handling?
Hello, is there one on Youtube that says that the Bin file can be updated by SD card? … That I know only IMG and as you say you only update camera and WiFi
I’ll have to ask about the new weight. I’m told that flight handling is fine, though note the unit is only flown indoors (part of robotic flight dynamics research – yes, there is GPS lock).
nice file, I found useful comments and strings inside
|ROM:0806EFC8|00000026|C|FLIGHT-DF806-v2.4-2019.9.2 (36ea946c)|
|ROM:0806EFEE|0000001E|C|PX4: c4dfb9bf NuttX: 258f2257|
|ROM:0806F9DF|00000009|C|CH10_OPT|
|ROM:080701D5|0000003C|C|\n\nInit FLIGHT-DF806-v2.4-2019.9.2 (36ea946c)\n\nFree RAM: %u\n|
ROM:0807250D aHomeYangOemDf8_0 DCB “/home/yang/oem/DF806-v2.4-2019.9.2/ardupilot/libraries/AP_HAL_PX”
ROM:0807250D DCB “4/UARTDriver.cpp”,0
ROM:08004190 aNote2019911606 DCB "NOTE: 2019/9/1 16:06:23 Frame : ",0xD,0xA
ROM:08004190 ; DATA XREF: sub_800A2B0+14↓r
ROM:08004190 ; sub_800A2B0+2↓o …
ROM:08004190 DCB “ACCEL_Z_D,0.015”,0xD,0xA
ROM:08004190 DCB “ACCEL_Z_FILT,2”,0xD,0xA
ROM:08004190 DCB “ACCEL_Z_I,0.3”,0xD,0xA
1 Like
Yes, some are also exposed on USB console…
Strange enough my unit is a V2.4 PCB (green) and report FLIGHT-DF806B-v1.2-2019.10.29 (36ea946c) while V1.2 is supposed to be the black PCB…
Date is newer, version is older, model (DF806B) seems updated, checksum is the same!
A clear example of chinese quality and configuration control…
1 Like
Send me your email or your whatsapp
1 Like
Wow thanks guys’ that files are mine actually DF806 firmware is not working with my drone that’s why i struggle to find the DF806B firmware since i changed my motherboard. the only B firmware i got is in the net DF801B which is the X9 so it wngraded almost all is working transmitter can link to the drone and propellers engaged but will not take off it just fall down. I bought my drone as Christmas gift to my self but till now not working  if somebody can be able to share there X12 firmware i will be so so glad and happy to assist doing the programming/ reading the firmware.
if somebody can be able to share there X12 firmware i will be so so glad and happy to assist doing the programming/ reading the firmware.
My email is celoys8p@gmail.com whatsapp +639560847689
Hi can you share on how to decode the bin file?
using IDA Pro, load as arm binary, set address and memory segment 0x08000000
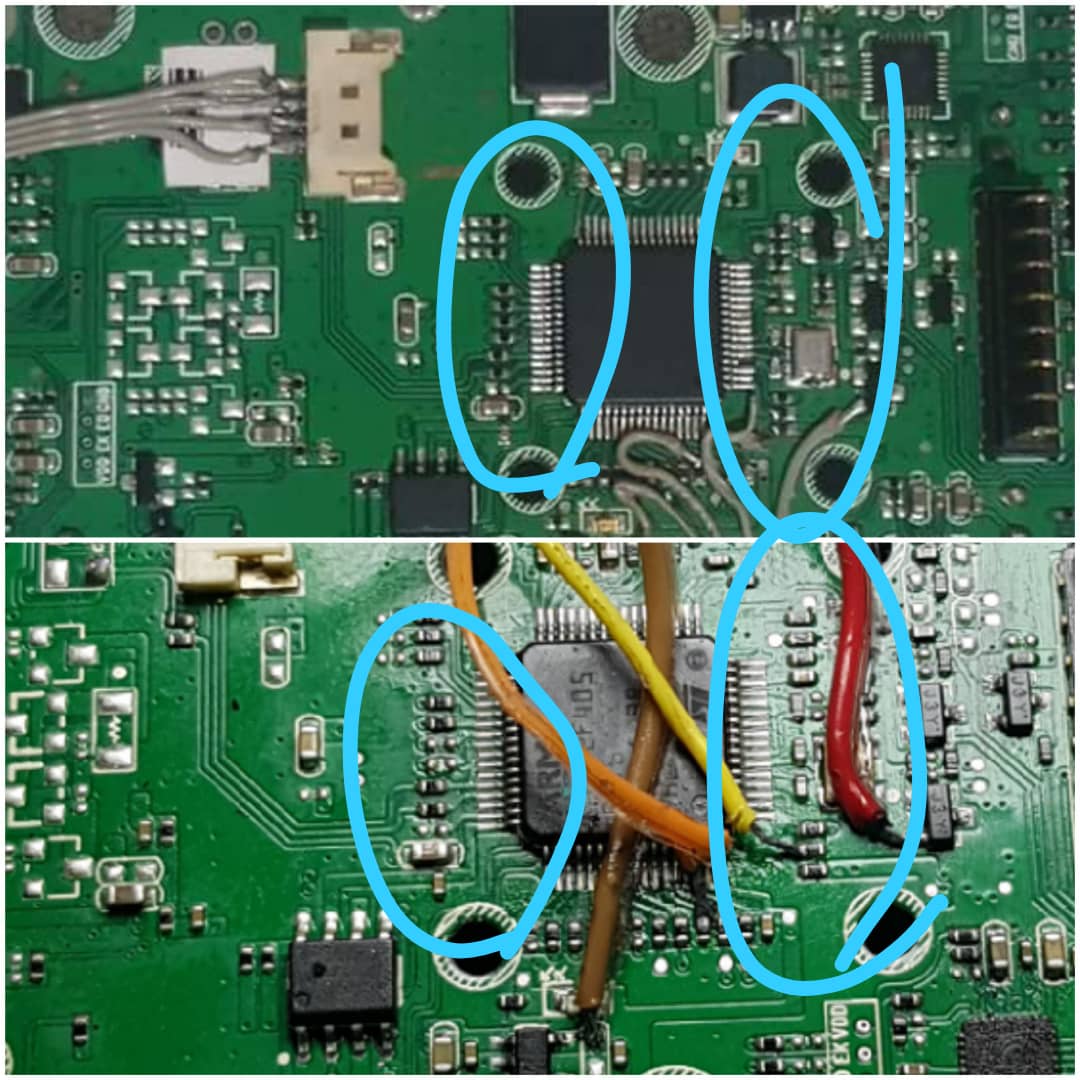
nice i will try that. if somebody here brave enough to so the firmware backup through usb this are the steps. need to put the drone in dfu mode by shorting two sets of points in the pcb and then use the st dfu software to read. start adress 0x080000. 1mb flash bin file.

Yes you will see PC will detect it as DFU usb. then after remove to boot in normal mode. nothing bad will happen coz boot is protected. Good luck hope for the best! Thank you so much. You cab whatsapp me
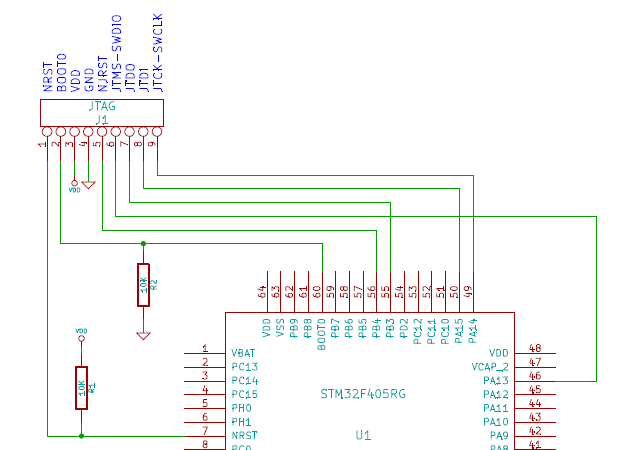

left point already pulled down by resistor and right - to second wire on my photo, connected to the same 3.3v
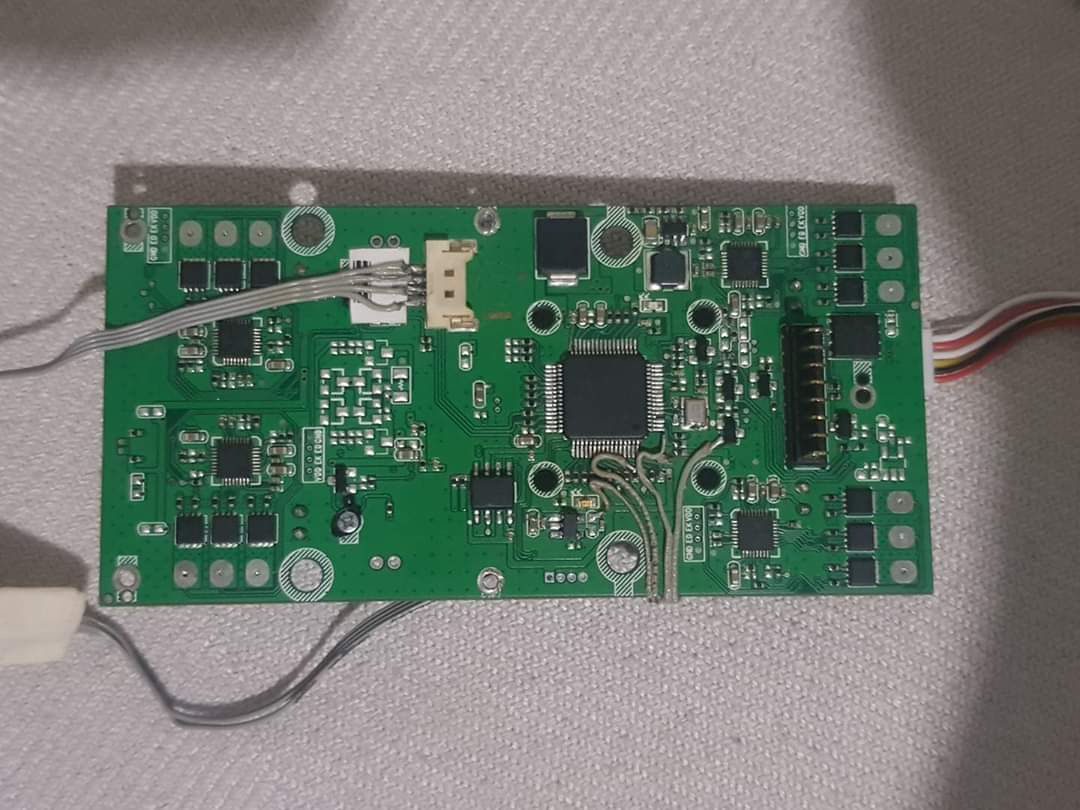
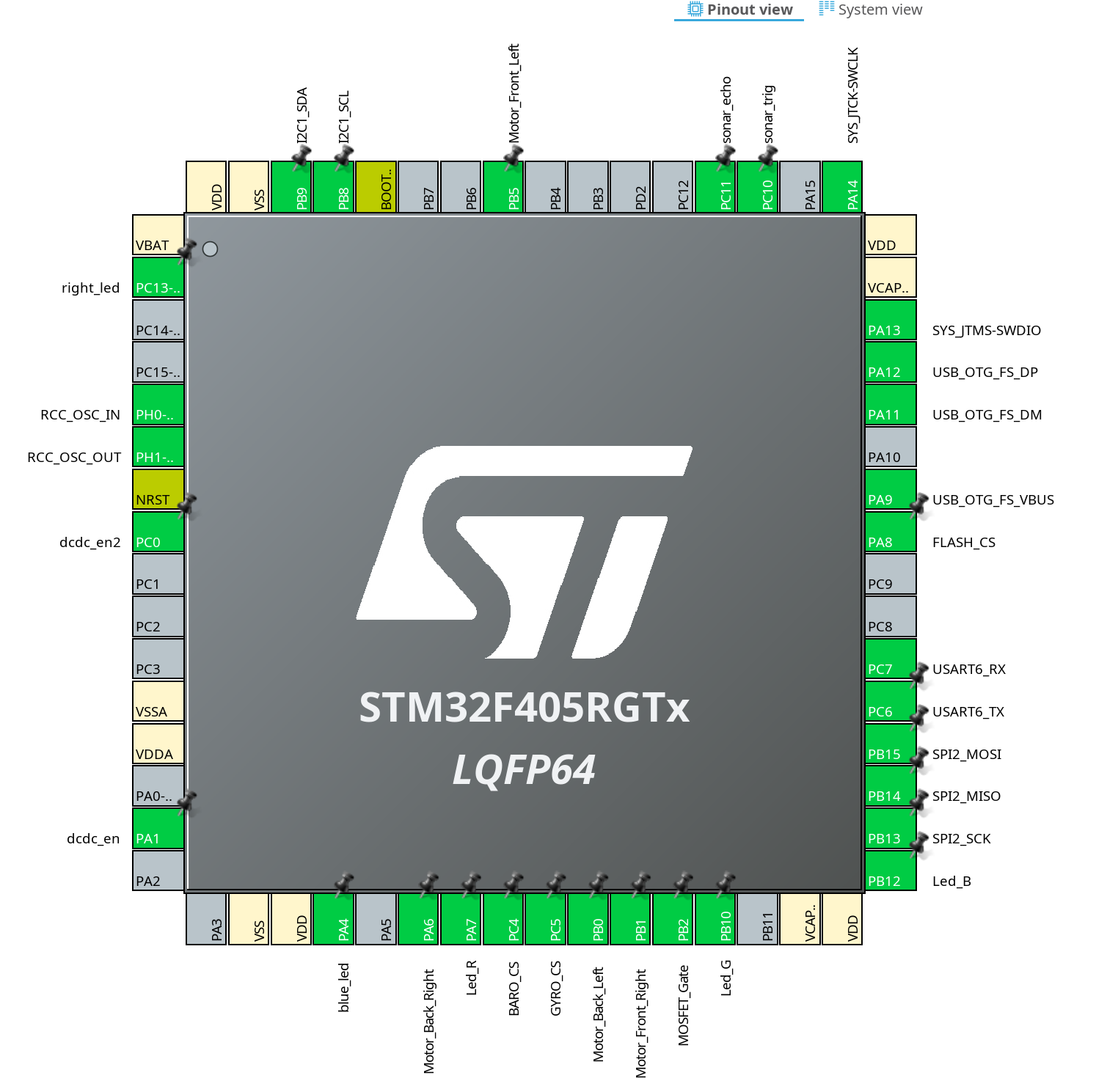
If someone will help with EX4 board for ardupilot hw profile - feel free to add data about schematics, now I need ADC pin for battery and one or two uart channels from linux board with Intellichip A7 SoC to STM32F405, pwm connection to motor controller and some other things
1 Like
Great let me know if you able to read the firmware from this we can be able to understand more about this. Im studying now the PX4 fmuv4 building the firmware from PX4 compiler/ Cygwin64 Terminal.