Hi Peter, your email confirms that our mutual intent is the same, solution not so much. May I suggest we arrange a conference call to discuss ?
We are two parties in Brisbane Australia, your location ? Preferred time and communication method ?
Hi Peter, your email confirms that our mutual intent is the same, solution not so much. May I suggest we arrange a conference call to discuss ?
We are two parties in Brisbane Australia, your location ? Preferred time and communication method ?
Hi Guys ,
sorry i saw only now this post … how i can help you ?
here https://www.facebook.com/groups/1606596929592397 you can found last my update that i’m doing on iseo lake …
https://www.youtube.com/watch?v=UThQOqrRUBc&list=PLskCFmXQqWGUKM3pr_ZNG4AM7tImiIHQq&index=57
Here there is 56 video of story of my test until begin …
This is my parameter if is usefull for other that are working on buoy system …
I’m available for support new project we are going in production with 10 new buoy this week …
boaconfig.param (15.8 KB)
Hi Peter the source is available of your application ? i could integrate in my app for android smartphone for define the position of buoy automatically and sure i can implement a mavlink transmition towards buoy for set its position
Hi Roberto,
Please contact me at pvanmuyden@gmail.com and we can talk. My main goal is to create a open source solution.
Peter
Thanks very much @Roberto_Navoni. Our test yesterday in a pool, with poor GPS, was much better, I think mostly because of putting ATC_STR_RAT_D=0. I’ll investigate how this can be improved. Next tests will be in the nearby river with better GPS + some current (tidal) and wind - with a SUP on standby for rescue.
Interesting concept this but wonder if it would be easier to have a RC boat that can carry the weight of a buoy to a set location on the map to go there, drop the mark and come back to its release location to grab another mark to drop?
I also race RC Sailboats in various class and being thinking of this for us.
@Gilbert, I suspect the position holding concept would be easier than deploying another buoy, with anchor, etc. Of course, having 6 or more position holding buoys, to form a course for example, would likely be more expensive but would also allow very quick course realignment. We had an idea last evening that could bring the cost down a bit - when we have something we think is near optimal, we’ll publish full details. But a major reason for this particular exercise is that the club races in channels in a harbour. Although they’ve been racing for perhaps 30 years, they’ve recently been told that they can no longer anchor a buoy in the channel - ie the anchor line is considered a danger to navigation. So the station holding buoy is ideal for that purpose.
@MoretonBayKiting I know too well as we also often sail in the harbour over here too. Because of the tides we can only sails every 2 weeks or so. We pick our sailing days based on the tides so it gives us a good few hours either side of the full tide.
But we also know some part of the harbor is very shallow at full tide. Ok for us with our short draft but it gets quickly too low even for us on ebbing tide. so we tend to sail in the access channel and this can cause issues with boats coming and going. So we set our buoys just outside the channel.
And with only occasional access to a rescue boat it can be difficult to lay marks so we use the permanent ones too but doesn’t suit all the time either…
To cut a long story short this is why we’re looking for some solution like you to set our course without the need for a rescue boat…
All this is good stuff by the way  fair play to you guys
fair play to you guys
Hi, came across this facebook video and thought I’d share with you since they’ve done it if you want to contact them to see how they did it.
https://www.facebook.com/groups/824445040926322/
Hi Louis, and thanks, the “they” in your statement is “us” !
Yes this is the result of the work Trevor Jack (@MoretonBayKiting) & Andrew Wilson (@AndrewRW)
But we have some way to go before the end goal of managing multiple buoys at the same time from a platform like QGroundcontrol control is complete …
@Peter_van_Muyden FYI !
@AndrewRW lol ok excellent 
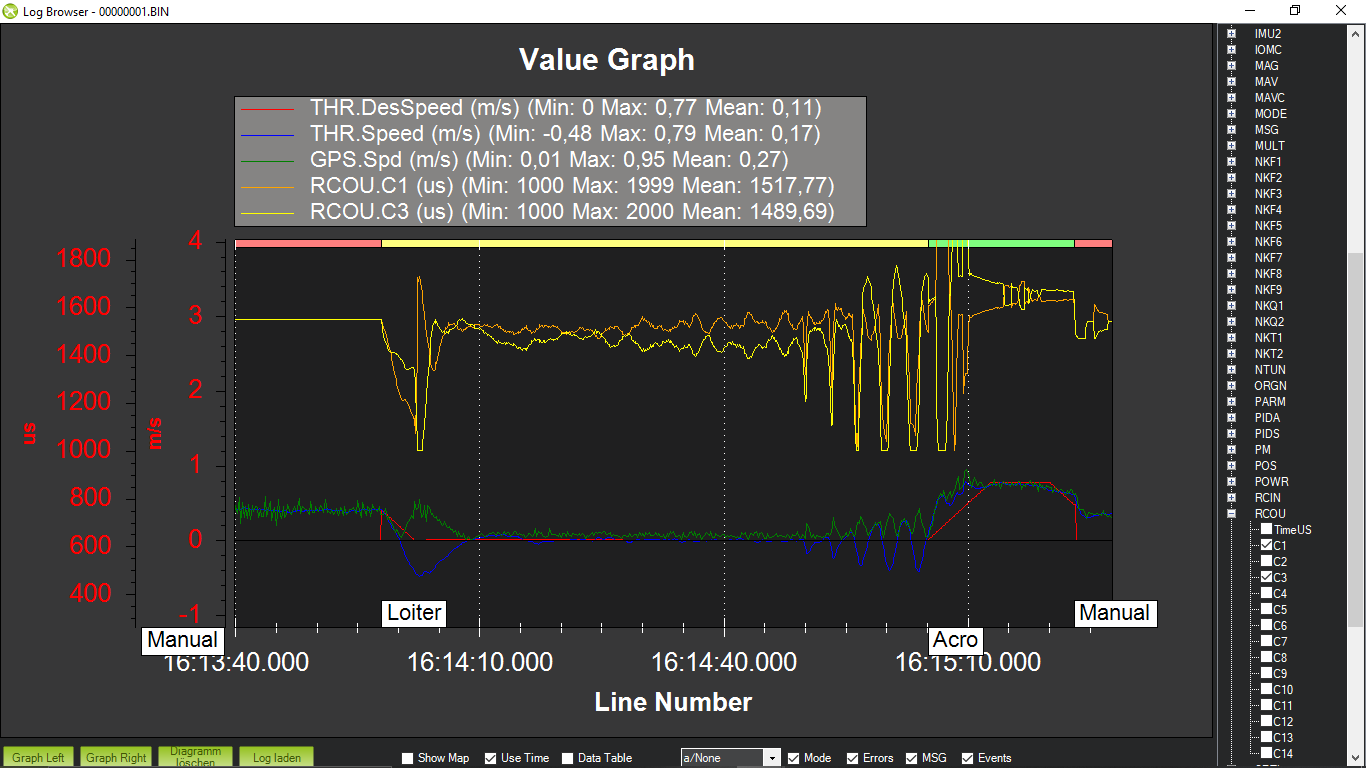
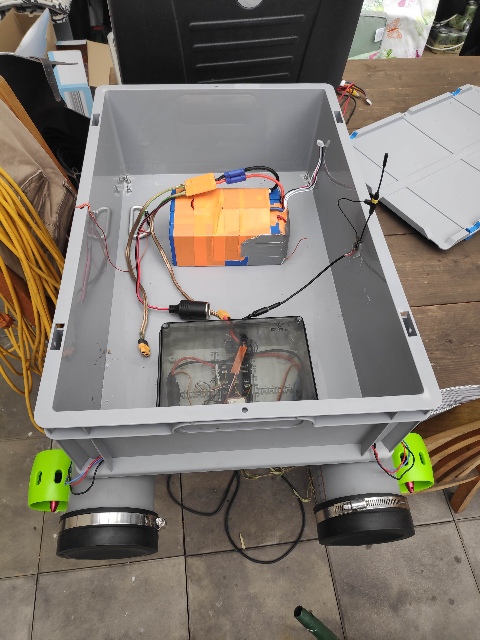
Hi guys, I am also setting up a buy boat (beta version…). Skid steering. As I am new to ardupilot, i am also testing the other modes. Manual, RTL and auto are working good (IMHO). But Loiter has this strange behaviour. Starting with throttle full back, it then stops and holds position for a little more than 30 seconds. Then it oscilates.
May you have some idea, where to look for. My log is pretty big (170 Mb). So i am not sure where to share it. The parameter list I will attach.
Best regards
Dieter
210517 alge.param (16.1 KB)
Hi Dieter - have you worked this out ? We are also experiencing same issue. Our work around is by using dampener “lee boards” … but would much prefer a software solution to this.
… and Dieter, those thrusters- you bought via Banggood I assume - have you tested them extensively ? Are you satisfied ?
for our project we are very skeptical and so sourced more expensive version via Blue robotics and they are functioning perfectly so far - and they come with 90 day warranty
Hi Andrew,
thanks for asking. I have at least found a parameter that could have cause this behaviour. The servo trim values have been at 1200 (whyever). The ESC are at zero at 1480. I adjusted the parameters, but were not able to test. Maybe today.
The thrusters are from ali:
12 24V 20A Bürstenlosen Motor 4 Klinge Unterwasser Ruder RC Köder Boot Zubehör RC Boot Zubehör Leistungsstarke Gute ersatz|Parts & Accessories| - AliExpress
For now, I am happy. Using them with 12V is power enough. No long term experience. Maybe 10 hours in auto mode. But my strategy is always starting low cost and improve, where it is necessary.
Very good, may I ask what your craft is designed to do ?
So, after a weekend of testing, some progress. The initial problem is the reverse behaviour. in acro mode with throttle below 1480, the servo out drops down to 1000. Even if I adjust the servo min to 1300. So there is no control of the speed.
But… reducing the throttle I term to 0.5 and LOIT_SPEED_GAIN to 0.0005 made it at least stable.
So in the end, I am searching for a solution of the backwards issue.
History of this project… I started again with rc sailing some month ago. At our local pond, we have a lot of sea weed on the surface. So my plan is to use this boat to push this weed to the side to be able to sail my micro magic. Therefor the powerful motors. The loiter mode was only a side effect first. But now I think, this could be a very flexible solution to setup a track.
Hi all. Just joined the forum. Recently been researching options for using buoy bots our Soling based RC Sailing club in Sydney. I have a fair amount of experience with RC helis and some experimentation with club friends using pixhawk on fixed wings. Great to find how much progress you have all made with the BuoyBot & thanks for sharing!
My current thinking is:
I am going to read the squirmtech build blog next.
Comments welcome.
Hi Grant, our solution is showing some promise in the IOM fleet. Drop me an email on andrewrwilson62@gmail.com for some details.
I’ve been using Blue Robotics thrusters since their Kick starter campaign . I have over five hundred hours on a set and still going strong.