Peter - absolutely no problem sharing - our mutual scope requirement is exactly the same - bar I sense the scale of the buoy ?
What we seek are buoys sized max 400mm diameter / ~ 2 kilo / ~6 hour battery life for inshore / lake use. Am I correct that what you seek are buoys for offshore applications - i.e. up to ~ 2 meters tall and ~ 48 hour endurance ?
No matter the end use, we believe the software / GUI systems could be identical, the hull, propulsion & top works would vary to suit the environment.
If offshore is the case, I am aware of commercially available offshore solutions - Marksetbot and Roboboj - and i’d be surprised if there where not others - (i know of at least one more under development in Turkey). I’ve tried to speak to both of these to sound out their willingness to offer a “micro” sized solution but no dice thus far. These two solutions are way beyond our price range, and way to large, and not sure that their GUI functionality (currently) delivers what we both would aspire to … and have no indication that they are willing to collaborate or share design or components. I’d be very happy to be proven wrong.
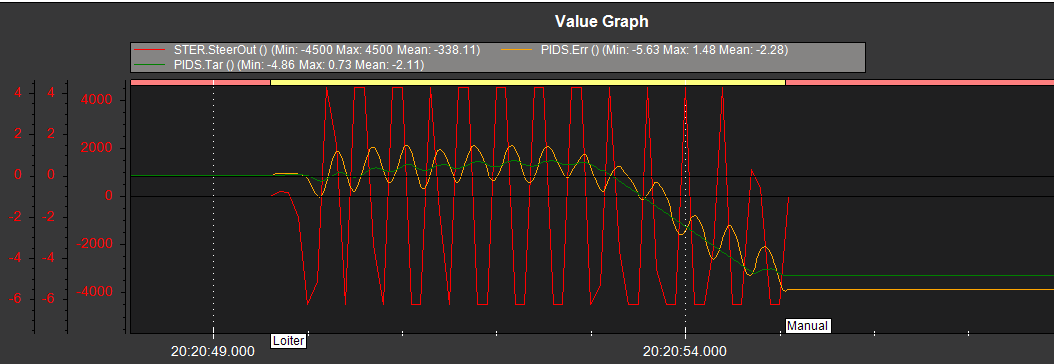
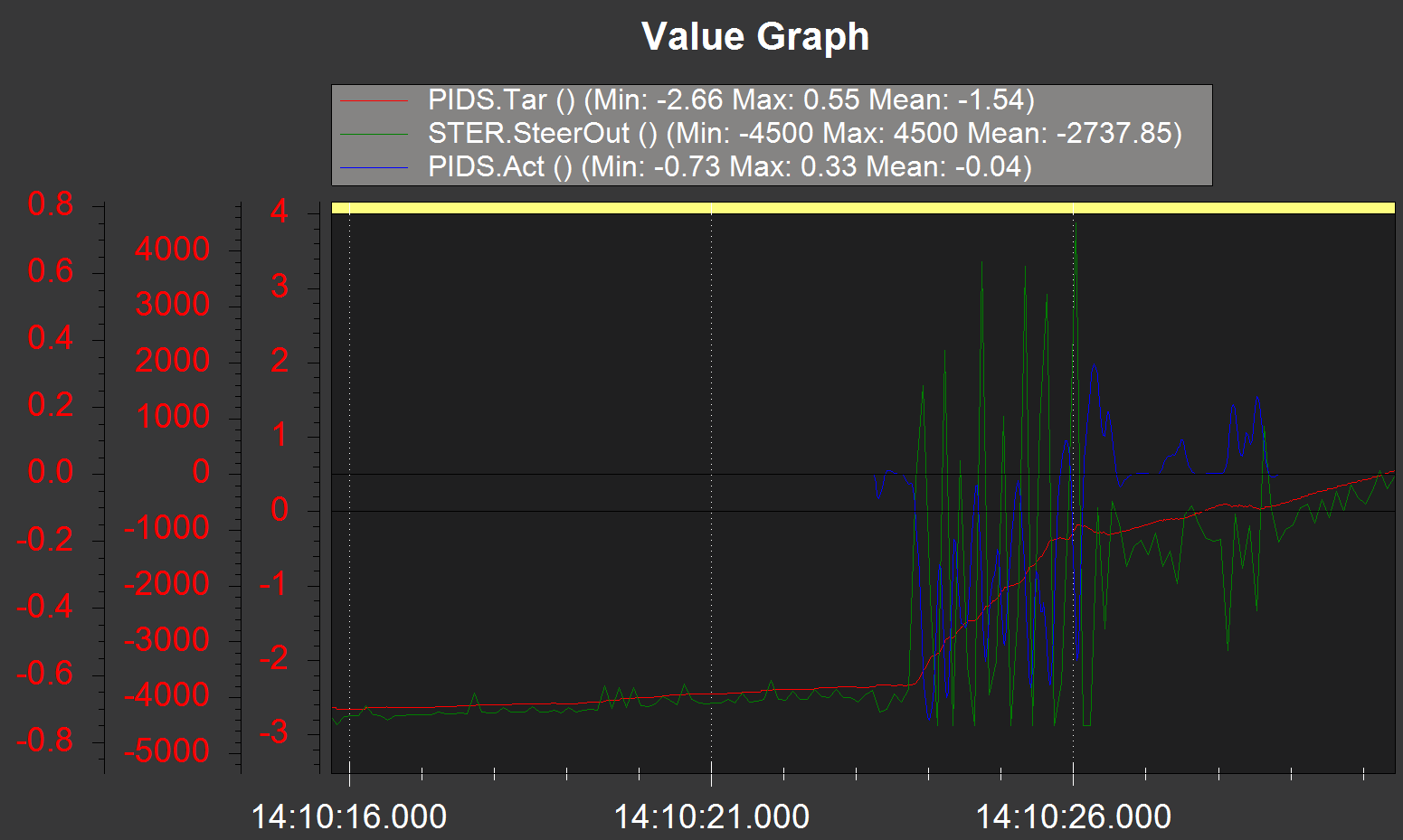
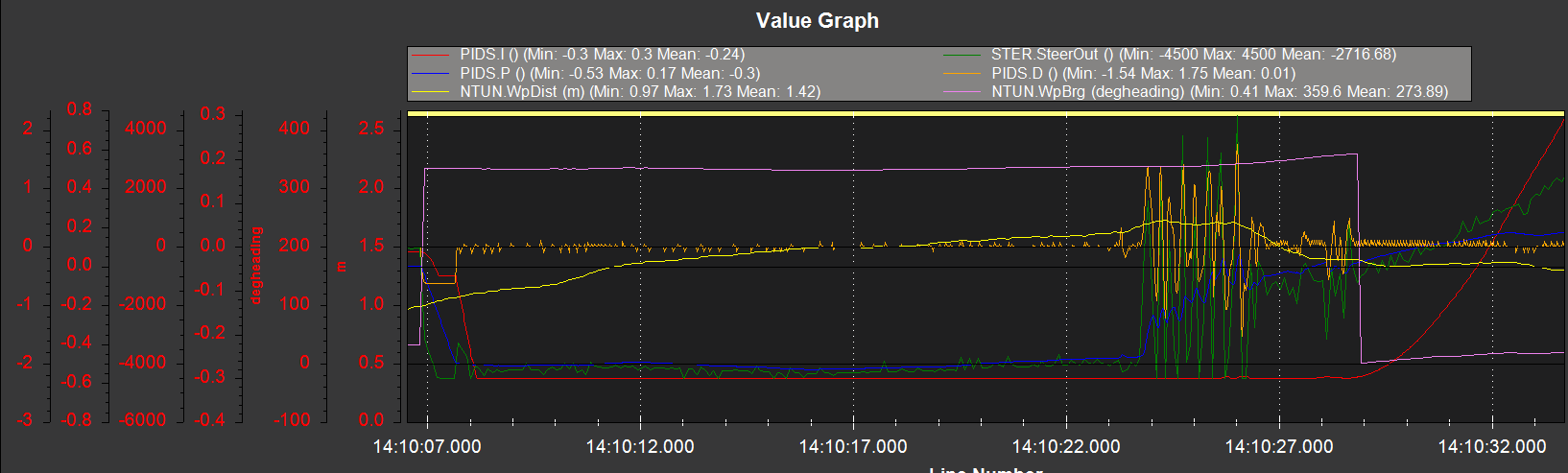
So for our prototype, my team of two has adopted this bogey board hull solution Announcing the Maker Boat Basic! developed largely by (i think) @nuballawalla (Daniel Carlson) & @rmackay9 (Randy Mackay) and are in the process of testing. Our status to date is that hull and propulsion are exactly what we want, but we can’t get the darn thing to “loiter”… but we are doing what we can, and taking/seeking input from this user group to sort out the issues …
We have a simple top works design and when the planets align will be posting to this forum, but prototype will be only a single buoy operated from a dedicated transmitter.
Next step, and we think its a big one, is the software / GUI / handset ability to direct and control multiple buoys from one control station / ipad / laptop, and we’ll really need help .
We can see applications for sailing, rowing, swimming, triathlon, water skiing, commercial shipping etc etc.
Trust this assists, and would be very pleased if you chose to collaborate.
You can also reach me on andrewRwilson62@gmail.com