I suspect most have already seen my two videos but in short, my autonomous buoy project is pretty much complete for now at least. We tested three designs and my personal favourite was the pontoon boat from AttracLab (shown in the 2nd video below). It handled the waves better than the Italian buoy and was easier to transport and setup than professor Kaizu’s boat.
1 Like
Thanks Randy - the RC sailing community appreciates your work and the kick start this has given to successful solutions. The link below is where our team are at
and i am aware that Robert Navoni (Virtualrobotix.com - Italy) and Thomy Blatter (Swiss) are also well on the way to excellent systems.
Are you having any Mag problems with everything so close together in the box. I’m building one of these for my club in Naples FL. I have a catamaran that hold position perfectly however it resembles a committee boat and not a buoy.
No mag issues so far David. And what’s wrong with a committee boat ? ! LOL
I’m trying a different approach to a buoy underbody. My Catamaran hold position well and we will see how this works.

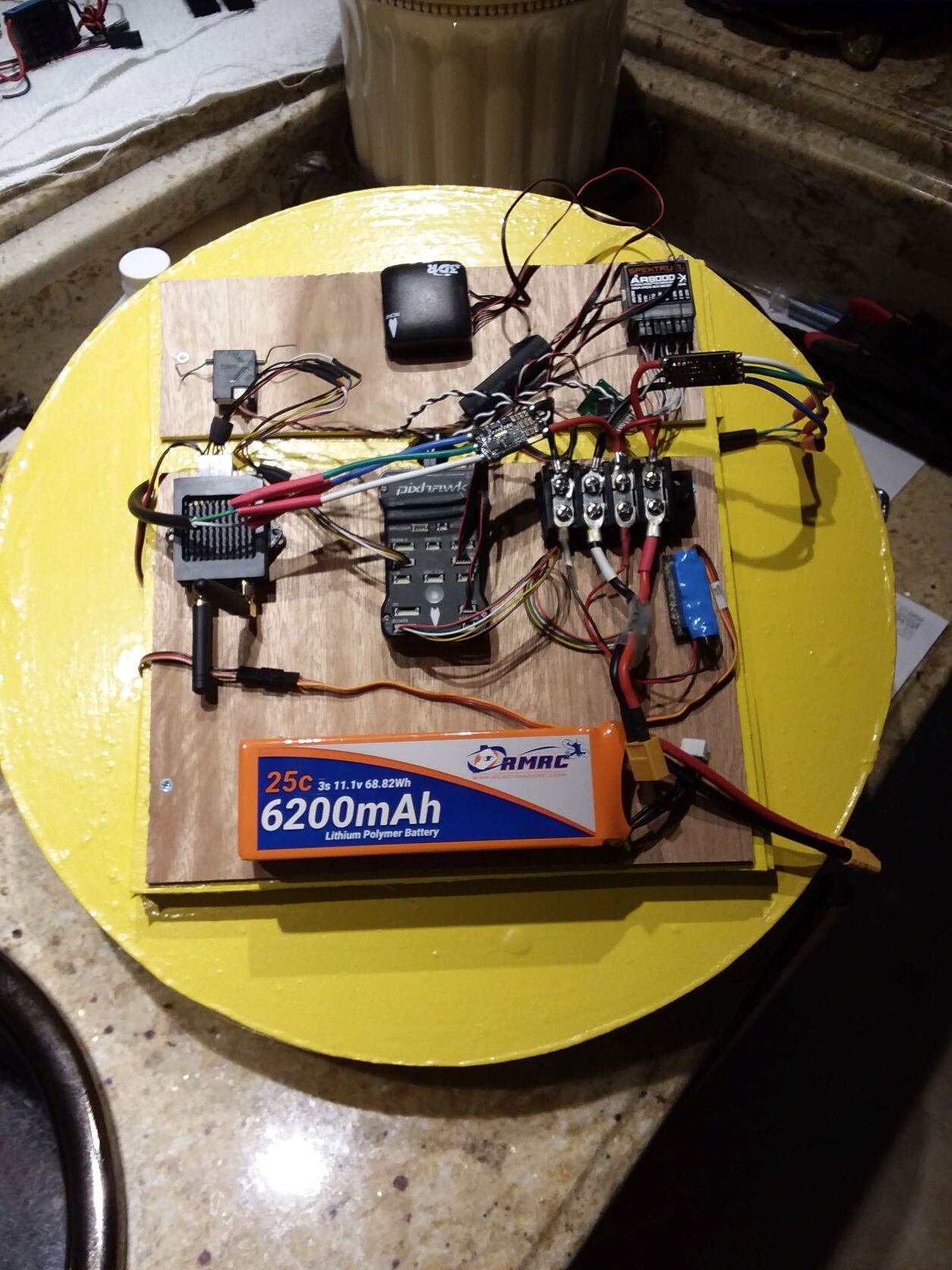
A plethora of spare electronics have been attached and it is ready for in water tuning. I’ve started with everything spread out alot. It can be condensed later. I just took everything out of my EC 12 sailing drone and stuck it on this. All calibrations are done and I will use my power catamaran parameters to start with. I expect I will need to tune things down a bit because this thing seems like it is going to be very agile with little wetted surface. I will figure out what type of lid to put on later.
Well done - our cat design using those same T200 motors measured 600mm long, and it was almost square. However, our user feedback (RC sailing community) was that the craft was too big. So only yesterday launched a new version on a 350mm diameter polystyrene disc, 65 mm thick. Works very well, however the T200’s ares so very powerful that have to set max throttle for them at 35% otherwise she wants to handstand all the time !
We are also trialling a second set of motors which are less powerful, and lighter … and they are giving us a better result. We use also using 6200MaH 3S batt.
Am happy to share our PID settings and a couple of others if that helps. Will also upload some short videos when i finally figure out how to do that.
If you have a chance post your parameters. I’ll do the same once I’m tuned up. My disk is about 400mm. I was thinking max throttle might be even lower. Fun stuff.
Got the Bot dialed in and tuned fairly well. My only problem is GPS drift. I’m using a 9 year old Ublox something. Just ordered a Ublox M9N from mRobotics. Hoping that tightens things up a bit. I hate to go the RTK route. Cheers
The top of the buoy will be a pyramid shape when finished.
1 Like
David - we are testing a number of different hull shapes and motors. this vide below the stable craft is 350mm diameter, and small Rovmaker 2216 motors, the unstable craft is 380mm diameter and BlueRobotics T200 motors.
2216 motors are set max throttle 60% and T200 25%
Steering rate P=0.15, I=0.15, D=0.01 - yet we get very different behaviour between the two.
I think i see pixhawk components in your set up ? We are using Matek M8Q-5883 GPS and Matek F405-SE FC
https://youtu.be/EjOIpu9AEBU - this video smaller hull shape tested only a few days ago.
https://youtu.be/ihq0q7Z5zOM - this video in testing our current solution, May this year.
regards
My P and I is .2. I think I read somewhere that D is not useful with a platform in a fluid enviroment but could be wrong. Played with loiter gain a bit. Looking at my logs all looked good except the GPS is drifting. I actually have the old T 100 thruster which are less power full. I think the multi constellation GPS should help me out. I also played around with the Pivot_Turn numbers. It was not twitchy at all but just thought it was in the right place when it actually wasn’t.
1 Like
You may be able to tune out the twitchy movement in the T 200 version with ATC_ACCEL and ATC_SPEED parameters.
Very impressive Mr. Boulanger!
1 Like
Thanks. It actually may be under tuned a bit. I built this thing with old left over stuff. Ordered a mRo M9N GPS to replace the 9 year old 3DR unit that is on it now. A new problem may be that the Pixhawk 1 unit I am using may be one of the 1MB units. According to mRo I may have problems with the compass on the new GPS unit. We will see.
It is my understanding that the Rover code does not support Omni Loiter for boats. If it does that would be the ultimate solution I think.
Yes, I think it needs Lateral Control coded in for omni loiter to work. I think the closest you could come to it is if the buoy was in moving water!
A retune with the M9N GPS and loiter radius set at .5. 30 Sat’s and a hdop of .4. So I guess its behavior is all on me and tuning it. No excuse can be made on my part.
Love to see the yellow top on it!
hopefully tomorrow with final tuning
Yea, this is looking really good.
1 Like