hi All,
I’m new to the ardupilot world and excited to post my first topic.
Not sure if Rover 4.4 is the right place, but since I’m using 4.4.0-beta1, here it goes.
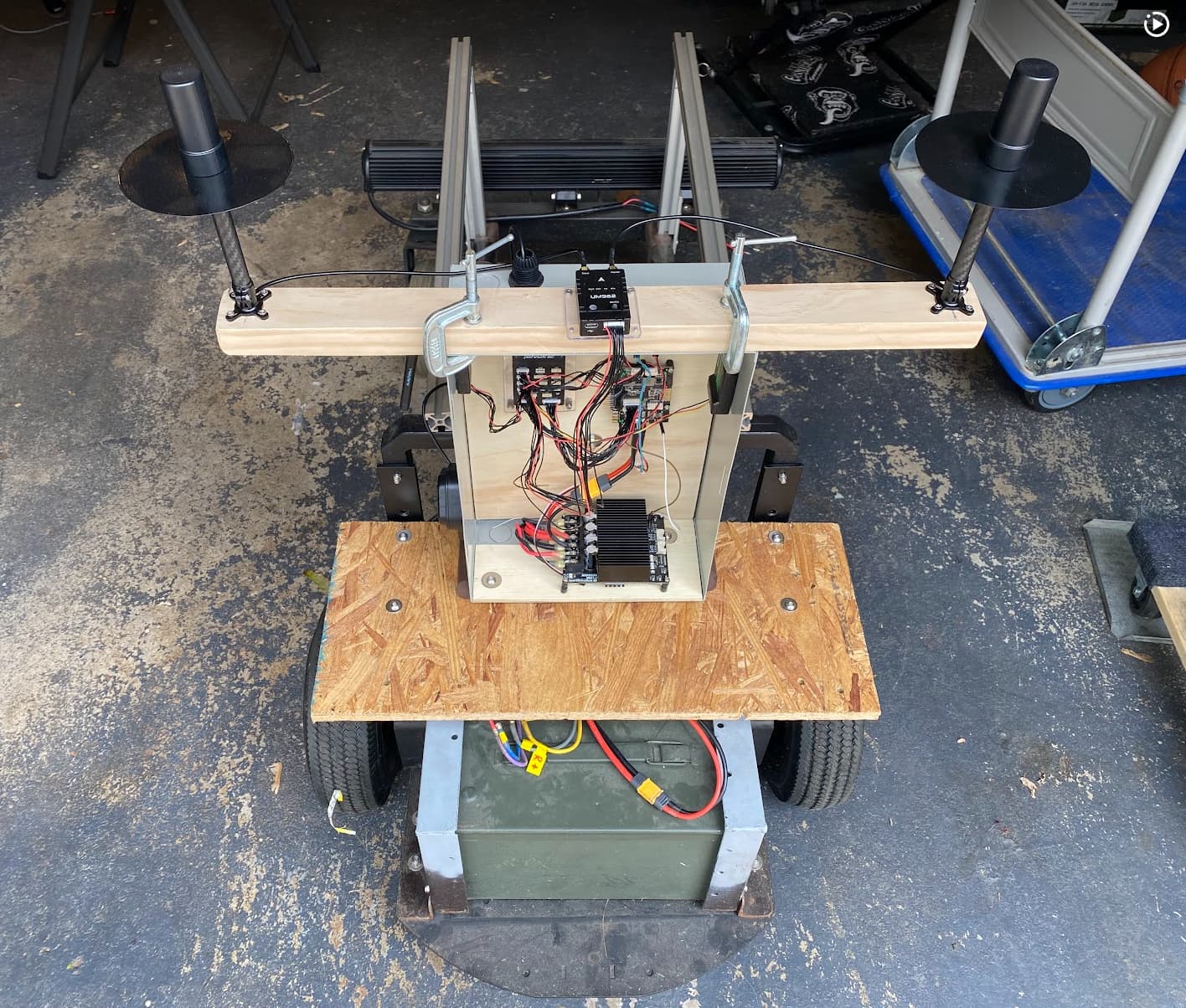
I built an arduino based RC mower last year and recently wanted to upgrade it to use GPS RTK and be autonomous. Similar to Yuri’s (ArduRover 4.1.0-dev Mower w/GPS Yaw - YouTube)
I started with pixhawk 6c and two ZED-F9P (https://www.sparkfun.com/products/18292) modules, one being stationary (GitHub - Stefal/rtkbase: Your own GNSS base station for RTK localization with a Web GUI, http://rtk2go.com:2101/SNIP::MOUNTPT?baseName=NJ_east) and one on the rover. Quickly I noticed that the built-in compass on pixhawk6C was not working properly likely due to it’s inside a metal enclosure or close to several DC motors regularly pulling 30+ amps.
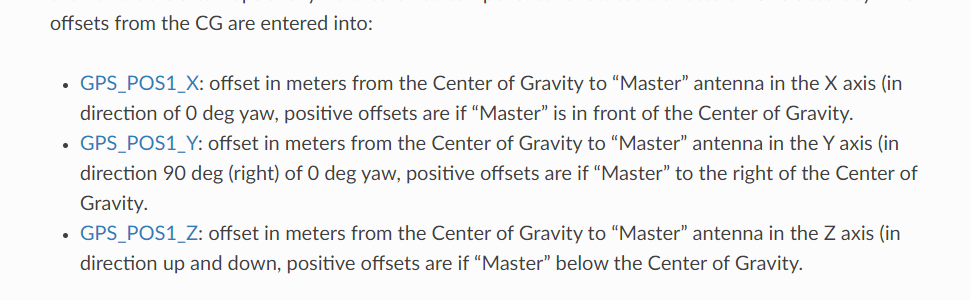
Decided to switch to GPS YAW, I saw holybro recently released their new um982 based internal GPS+YAW (H-RTK Unicore UM982 (Dual Antenna) – Holybro). After a bit googling and found GPS was a newly added to rover 4.4, I uploaded rover 4.4.0-beta1 and got GPS and compass reported in MS.
However, now I’m facing a problem:
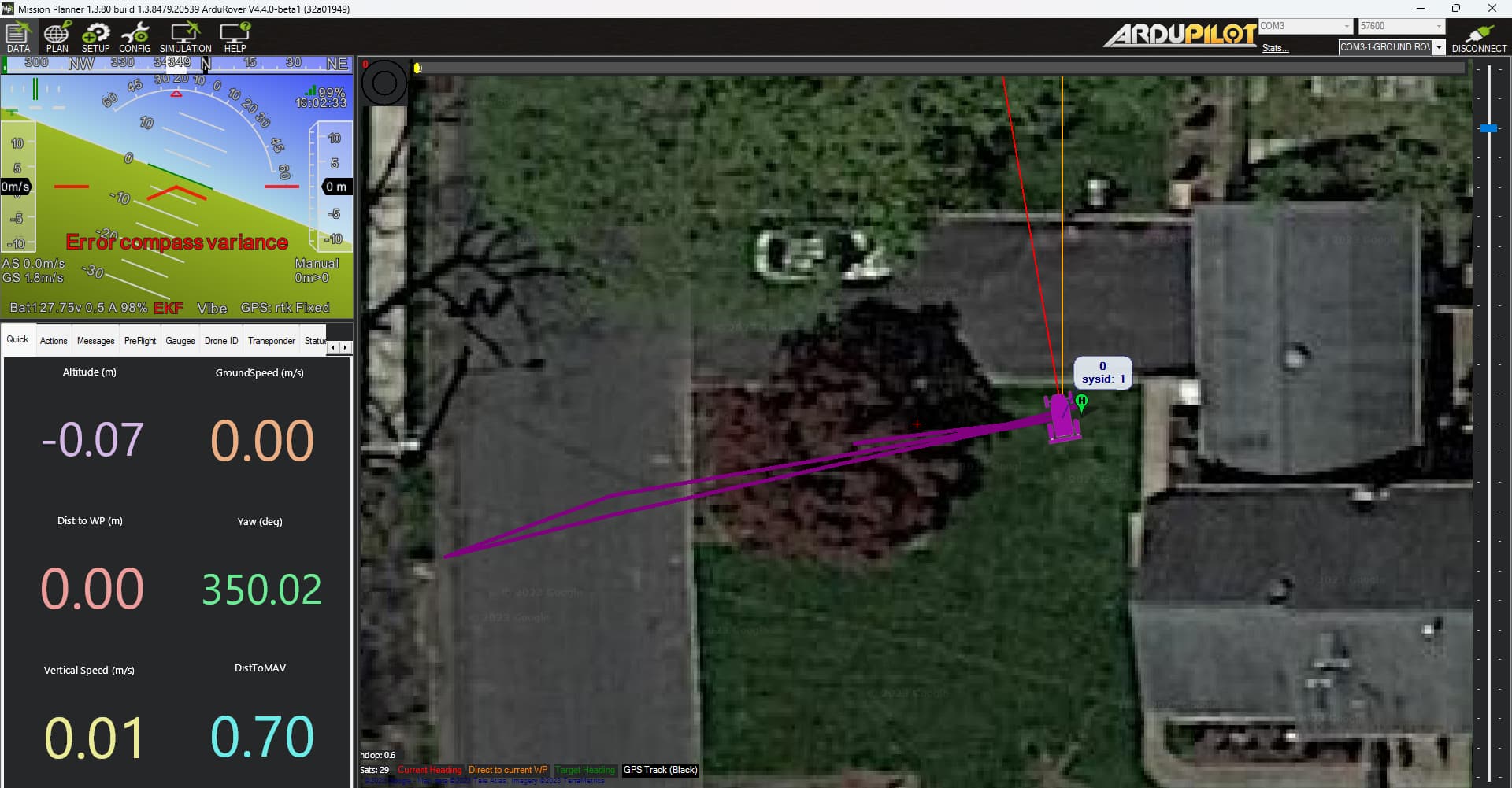
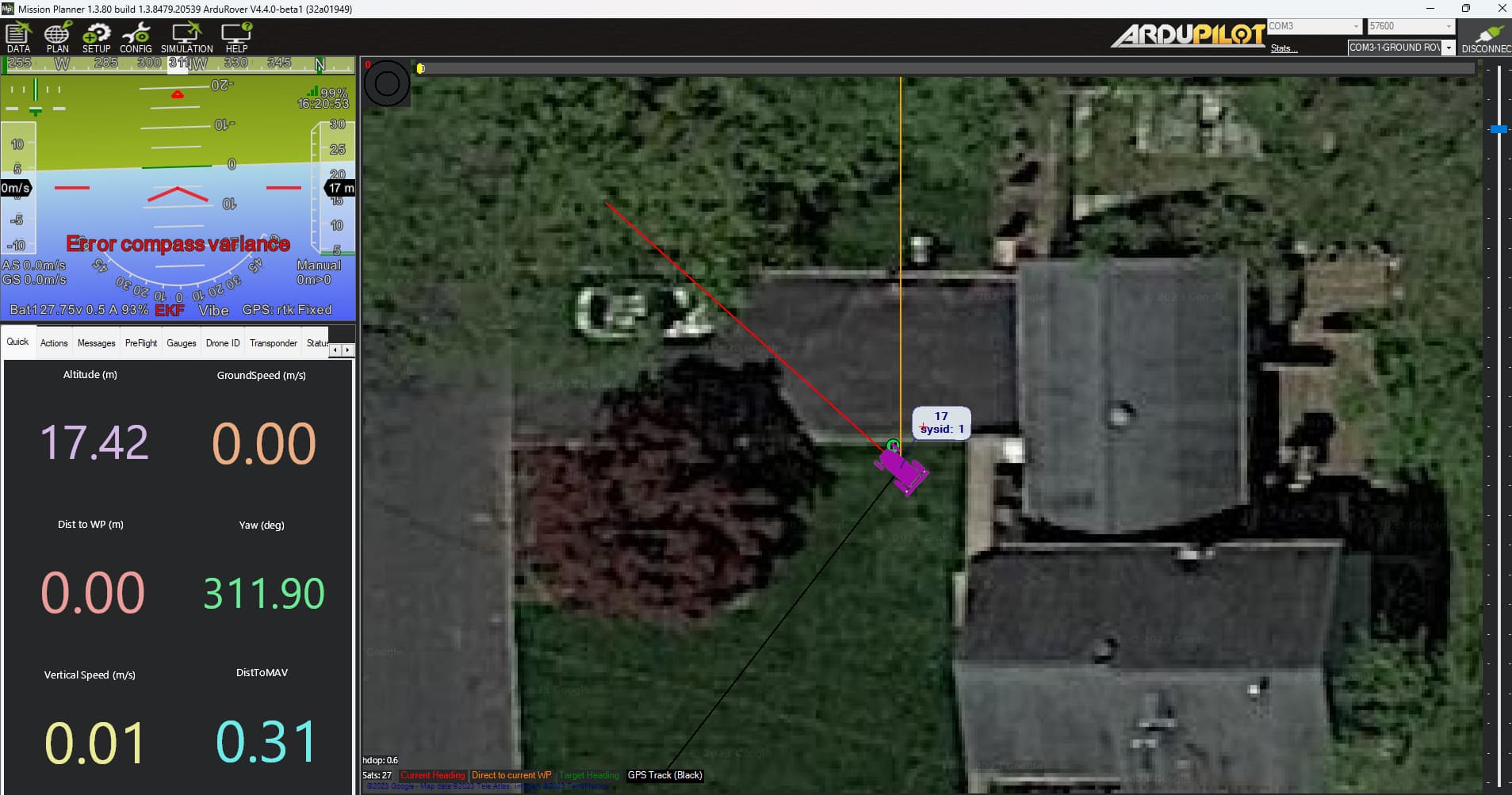
The GPS position from UM982 seems not accurate and moves quite a lot, mostly several meters even it shows RTK FIXED and the mower is not moving at all. As a comparison, when I was testing with ZED-F9P, the GPS position was dead steady with only 1 or 2 cm movement. My question is how to identify the root cause of the inaccuracy? UM982 ? antennas? or something else?


the rover is facing north and being stationary.

the MP shows
if I zero turn the rover 360 degrees and facing north again. The orientation somehow turned upside down.
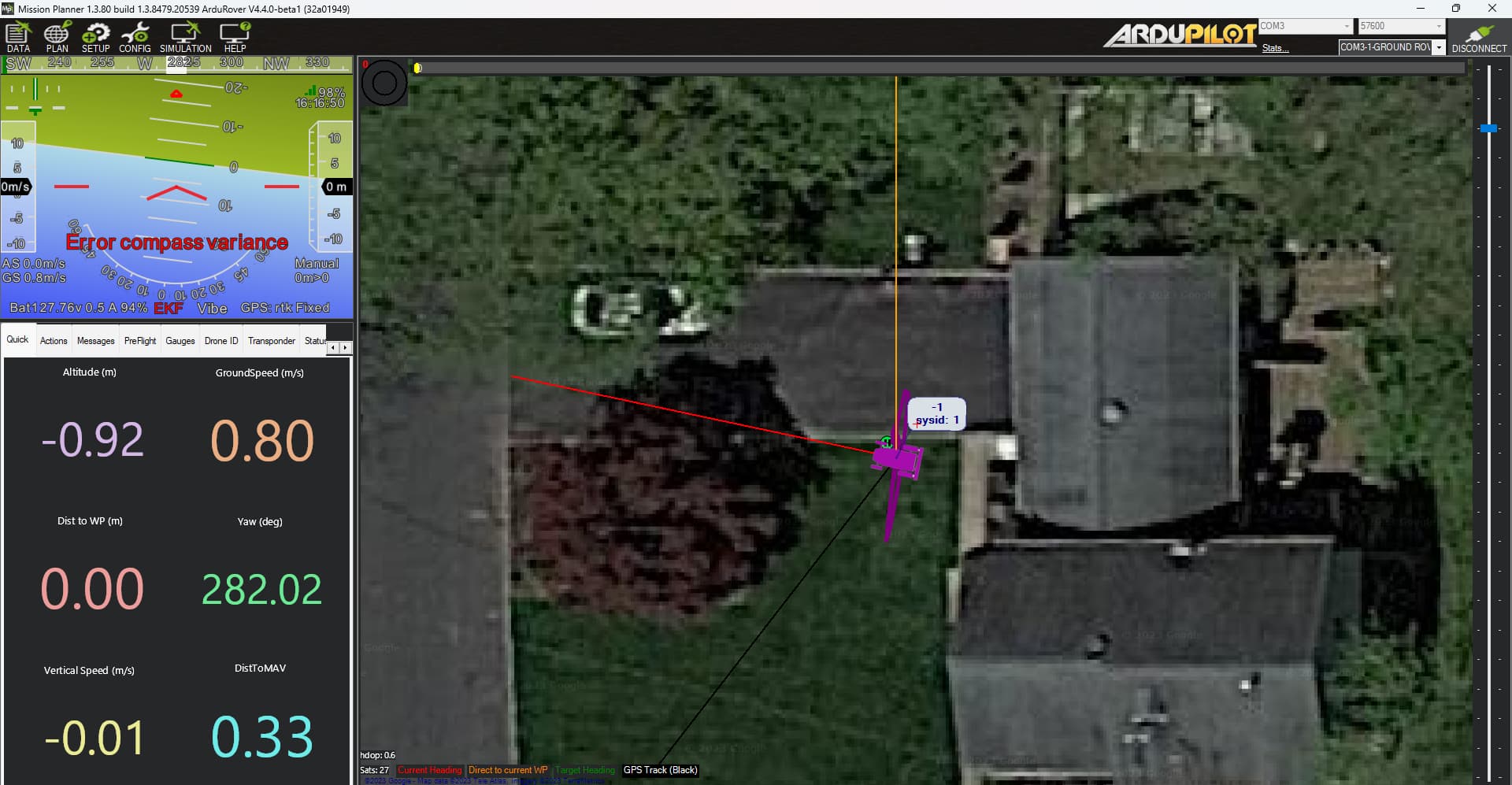
Also, I noticed if I leave the rover stationary for a minute or two, the GPS position seems to become stable and accurate.
took a quick video showing the position inaccuracy (please forgive my voice, having a cold)

configs
configs.param (14.6 KB)