Esc are very close to the pixhawk. I don’t know if you could have some issues with electromagnetic interferences. Maybe you could place them under the arms. I really like this simple but effective design. Good job. Nice videos and very nice video intros.
1 Like
I really like this project and I’ll be watching this one
1 Like
Be sure to check out the videos that @rob215x posted in the thread, which are excellent. Robert also posted plans for the build which are also very good.
1 Like
That is how I found this topic 
1 Like
Good for you - lots of great info and helpful people here. And if you haven’t already done so, check out the build videos of @hugues which are also excellent.
3 Likes
Final Notes
This thread is basically finished but I wanted to close with a photo of the functional frame:

The props pictured are certainly not the most efficient for long flight times but they do produce much less vibration overall. I’m still experimenting with the frame, trying different combinations of motors and props. So far it has proven to be very stable and reliable.
Here’s a 5 minute flight test with default PIDs, and no video stabilization:
1 Like
Awesome. Waiting for more pic/movie.
I have a question re:h-frame. I have inherited a design that has motors configured in the H-Frame setup (front right rotates CW).
My question is (hasn’t flown yet) using the Mission Planner motor test - what should the positions of motors A-B-C-D - same as an X?
The MissionPlanner motor test ALWAYS labels and activates the motors in Front/Right=A and next motor clockwise is B, C and so on - regardless of the frame type or motor numbering in Ardupilot.
So it is confusing at first, but it’s like a double-check that you’ve got everything wired up correctly.
we can offer the carbon fiber plates and carbon tubes round&square,www.acencarbonfibersheet.com
1 Like
Good contribution as a first post…
1 Like
Hi, where can I get more details about monocoque frames? especially this one of yours.
What is the frame type we can use with a hybrid H configuration?
is it H? or is it Quad X?
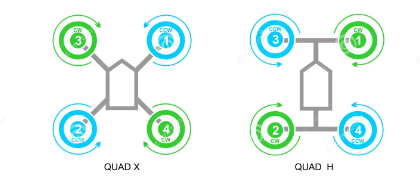
There is a difference in the motor direction to mitigate the twist of the frame resulting in an adverse yaw effect in a H configuration.
1 Like
I am also working with that frame i know that is a Extended X but i dont know what do to with the change in the parameter specific for this.
If it’s like the one in the photo posted above start with Quad X-frame.

Yes, Quad-X Quad-X works for many quad frame geometries.
1 Like
Quad X refers to any frame, regardless of scale, where the motors are placed symmetrically in an X shape. If you want to run “props out,” use the Betaflight X Reversed frame type. These two types should cover about 90% or more of quadcopters built for ArduPilot.
1 Like
What a beautifull drone. I am thinking of converting my iron man to 8x. How does it fly
Is this frame or its files available for purchase?