Most likely bad STER pid tuning. As David said, an auto run will help us figure out what is wrong, and a few manual turns at cruise speed would also help.
Well, yes to a point. I’m guessing that the STER parameters are not adjusted correctly and that thread will shed some light on to the analysis of how we try to get them correct.
Hi, i had a same problem with my boat, in auto mode, she swam in zigzags.
Spent quite a lot of time to adjust the parameters (about 10 hours). Not I’d say that with all were worked out, but boat now swims adequately (https://youtu.be/1IywUuRiJfs). Full list parameter’ll attach!
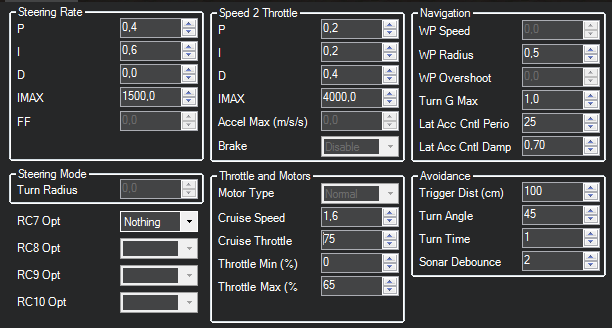
Accurately remember, that first got hooked for parameter STEER2SRV_IMAX, under his increase controller is beginning to more aggressively steer and try to keep course, in further reduced significance this of the parameter, that would governance was more smooth.
The next parameter NAVL1_PERIOD, a low value leads to a low level of response to a control error, a large value causes the course to return aggressively, i stopped at the value of 25 seconds.
And third this PID’s, STEER2SRV_D as me it looked not gives nor what good, only makes the boat more nervous in managing. So I set 0.
STEER2SRV_P large values lead to overshoot, small to understeer, just need to pick up. I was approached 0.4.
And the last output parameter STEER2SRV_I, it greatly affects the zigzags, I set to 0 and then gradually added. While the value is too small the boat can not keep the course as soon as it starts to stay the course, add a little more. Larger values immediately lead to overshot and zigzags.
I use APM 2.6 with firmware rover 3.4.2 boat.param (4.6 KB)
Small values of STEER2SRV_FF (<1) did not give any result, large values led to zigzags.
“Also cruise throttle is more than throttle max” - agree, on fact he swims with throttle max.
“I did not think 3.4.2 was good for an APM 2.6.” - what’s good? As I understand it further APM support is discontinued and this is the last available version?
2.5.1 is the last for APM 2.6. STEER2SRV_FF will most likely be >1. Then the NAVL1 is turned up to mellow out the zig zag after the STEER2SRV P,I, and FF are set reasonably well.