Googles Blockly visual program editor also supports LUA scripting, I have used it for home automation for years as a simple way of doing basic logic, but if someone built a version specifically for autopilot it would make Lua programming radically simpler, generating Lua would just be a matter of picking your inputs and outputs. generating mavlink messages would just be a couple of clicks and with all the new Lua bindings it has the ability to be extremely powerful but simple enough a child could do it.

2 Likes
I really like this idea. I would love to see someone take this on and provide some ArduPilot-specific Lua visuals and output.
While my own skillset is probably (barely) adequate to make an attempt, I fear I would not have the time to do it proper justice, nor do I have a background in web development that would probably be useful for the project.
I wonder if a guy like @willpiper24 could work some magic with this? Or perhaps, like Will’s GSoC 2021 Firmware Builder, this may be a candidate for a future GSoC project?
2 Likes
This is really a good idea.
I think for a starter, it can be developed using SITL.
I have made some progress towards making this work, but rather than tackle a custom blocky implementation, I have been making a json to mavlink converter.
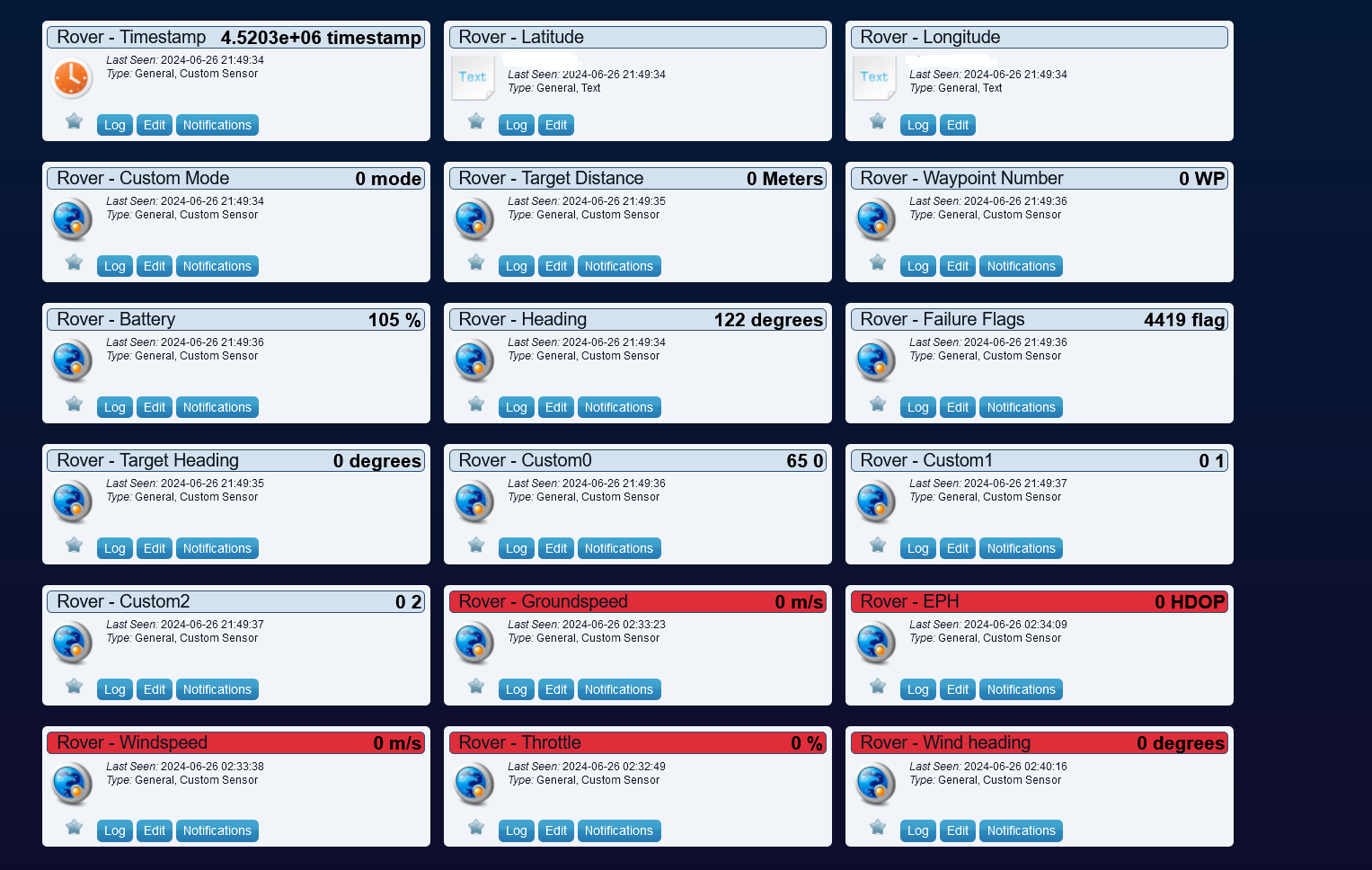
The idea is if we can convert all the mavlink sensors to json sensors using an ESP32 chip, it can then be sent to a home automation system that has blockly built in for making custom actions.
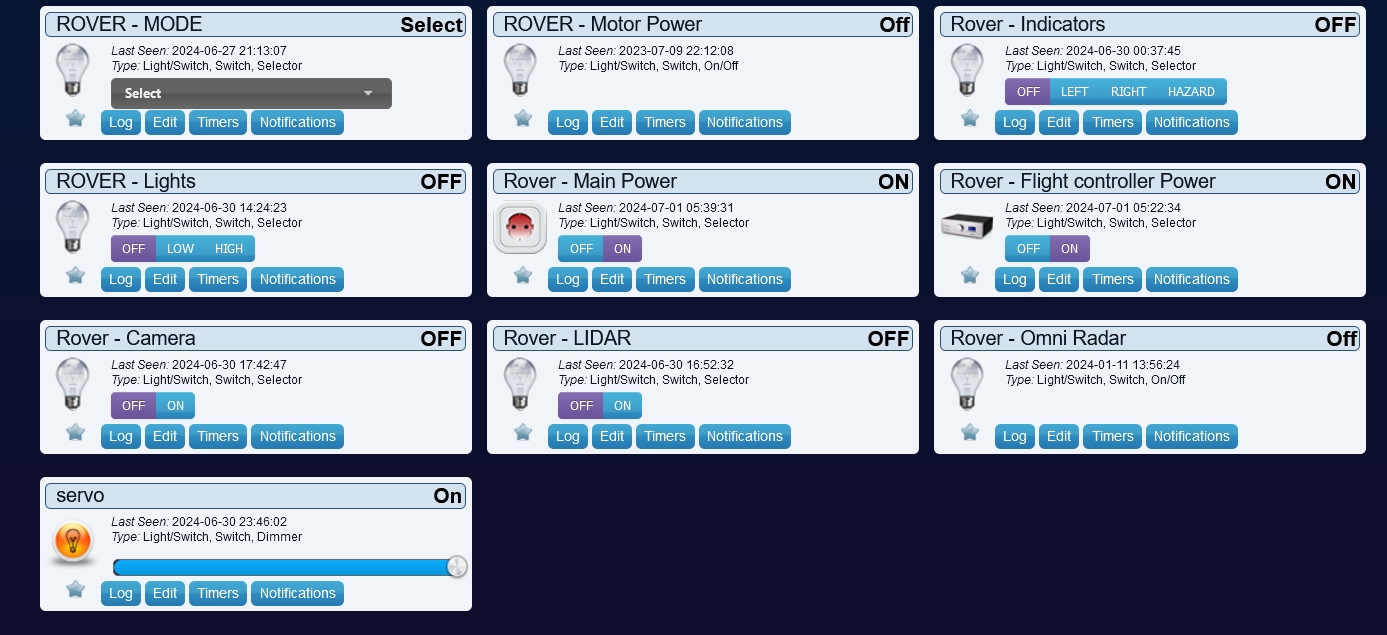
Sensor data or commands can be sent to the rover by writing the sensor or command to a virtual sensor. The virtual sensor result is requested by the ESP32 and relayed to the flight controller by sending a mavlink message. so in theory it could do anything you can do with mavlink messages.
The main reason I’m looking to use this is for long term logging of a solar rover. mission planner is never going to run for months without crashing, so I needed something more reliable that could also send alerts to my phone if something happens to it, as it’s going to be doing laps in a public place and I can’t watch it 24/7.
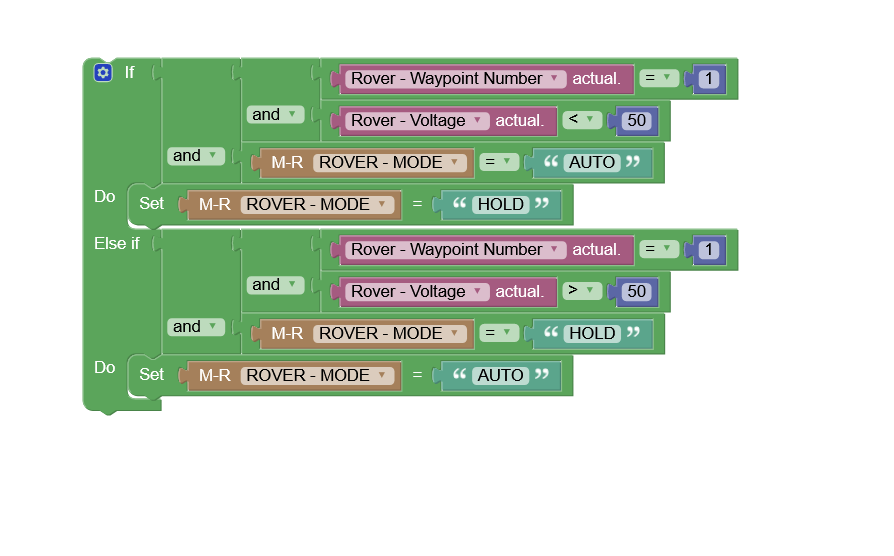
in theory this example should stop the rover once its done a lap of the park and its back to the charging area at waypoint 1, if its under 50v it will enable hold mode until it’s over 50v, then it will switch to auto to do another lap.