Hi! The last time I built a multirotor with ArduPilot was on an APM with Hobbyking Blue Series ESCs flashed with SimonK and Multistar 4208 motors. Was a successful build and used to get 15 minute flights on a 4S 4000mAh, on 14x4.7 props. After that, Ive mostly built racer quads and have used the Pixhawk on fixed wings only.
Also I’ve built and flown a few racer quads with BLHeli_S firmware. Haven’t had major issues with them so far.
Now I’m building a ZD550 frame and putting a Pixhawk on it.
I’m deciding on the motor and ESCs for this build and was wondering how easy it would be to actually setup my build with BLHel firmware. I am looking at a 4S setup with 12 inch props and maybe upgrade to a 6S setup sometime later. The main reason I’d like to go with BLHeli is the form factor and that’s what is a little more easily available where I’m at.
I have only ever installed the firmware using Mission Planner, never built it from source. How difficult would this be, provided I have a moderate competency with figuring out how to install and use software by following documentation?
Also this is the ChibiOS build? https://github.com/ArduPilot/ChibiOS
Also should I just look for regular ESCs for this build and experiment with BLHeli at a later stage?
Yes, I am aware it is much superior firmware and I have had a great experience using it on my racer quads. How well does it play with the default ArduCopter firmware? Can I use it with that or do I have to compulsorily use the ChibiOS version?
Also, with the default ArduCopter firmware, would it be possible to mitigate any potential issues by setting the motor PWM outputs of the Pixhawk to 1000us(min) to 2000us(max) and at the same time calibrate the BLHeli values to 1000us (min) and 2000us (max)?
BlHeli32 , like James says, is a good choice because of telemetry.
Quadcopter you plan have less use for ESC telemetry anyway, if one fail, the outcome is given. Had it been a big , redundant RPAS with =>6 motors, it could ba a nice feature (and an fail is still easy to spot by throttle demand monitoring)
but ArduCopter does not use this telemetry (yet) for handling faults - which would be the BEST argument for blheli_32
blheli_s may have some slight efficiency advantages due to better PWM, but I can’t say whatever it is more of an theoretical advantage, or can make a typical setup save a few percent of power.
Personally, I don’t see any reason what so ever to use ESCs running BLHeli firmware on anything other than a racer.
I have a racer. It uses BLHeli. Its a blast to fly.
I have 3 other aircraft larger than 500mm. 2 are quads, the other is a hex. I use Hobbywing X-Rotor 40A ESCs. Work fine, last a long time. No muss, no fuss, hook 'em up, calibrate, fly.
Based on the documentation I read (See warning above this link: http://ardupilot.org/copter/docs/common-dshot.html#where-to-buy), the BLHeli with telemetry is only supported on ChibiOS, is that still the case with the latest 3.6 release? If it is still the case, is ChibiOS ready for general testing with 3.6?
Do the ESC telemetry messages get communicated over MAVLINK for Arducopter 3.6 yet?
The Copter-3.6 on ChibiOS testing seems to be going well. I haven’t see any crashes caused by bugs in the ChibiOS port but it’s still in beta so I don’t think we can say it’s totally stable.
By the way, Copter-3.6 testing was put on hold for a few days as we test Copter-3.5.6 but it will resume today or tomorrow.
ChibiOS also allows display of BLHeli32 telemetry values in the OSD, including ESC temperature, current flow and RPMs. IT is valuable for fixed wing and multi rotor, especially during early verification of a build and it’s power train.
It’s a low level issue with how nuttx manages DMA to a pin, that can’t be fixed in the flight code layer. Noting the work to drop nuttx as soon as the ChibiOS port is confirmed stable, I don’t think any effort will be spent modifying nuttx.
Dear All
Trying dozens times and cant do my BlHeli_s work with my PIXHAWK. The motors do not spins, and passtrough does not work too.
Please anybody to send a quad parameter file to help me?
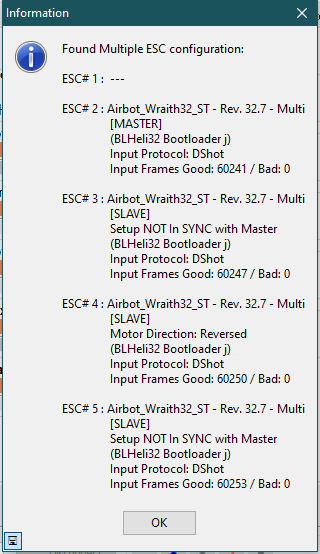
Bob, these are the settinigs that I have. I finaly got BLHeli32 to see my TEKKO32 ESCs, but it is skippiing ESC#1 for some reason. You also need to look into the Mototx/SERVOxx_" parameters settings. Let me know if you fixed the issues.