davidae
April 8, 2021, 5:47am
1
Hello!
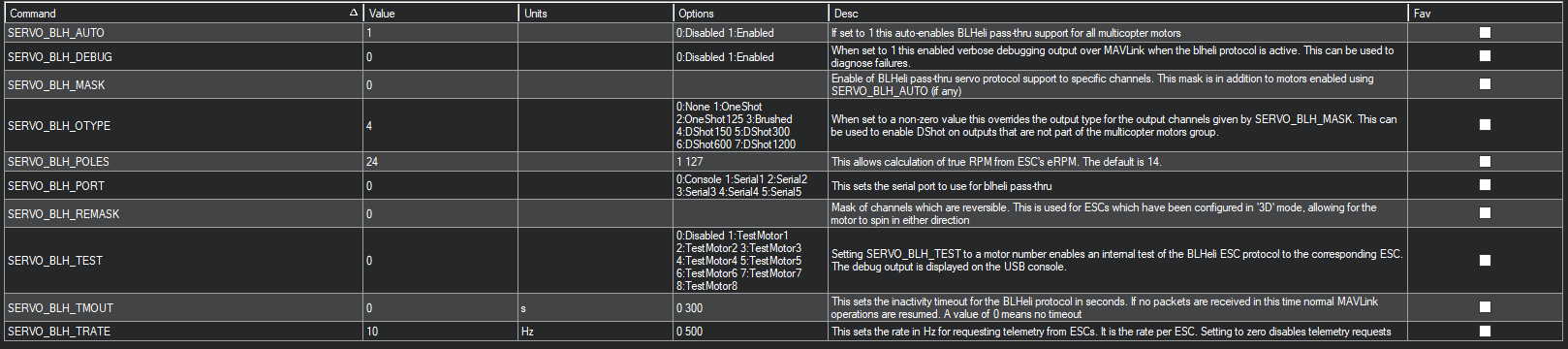
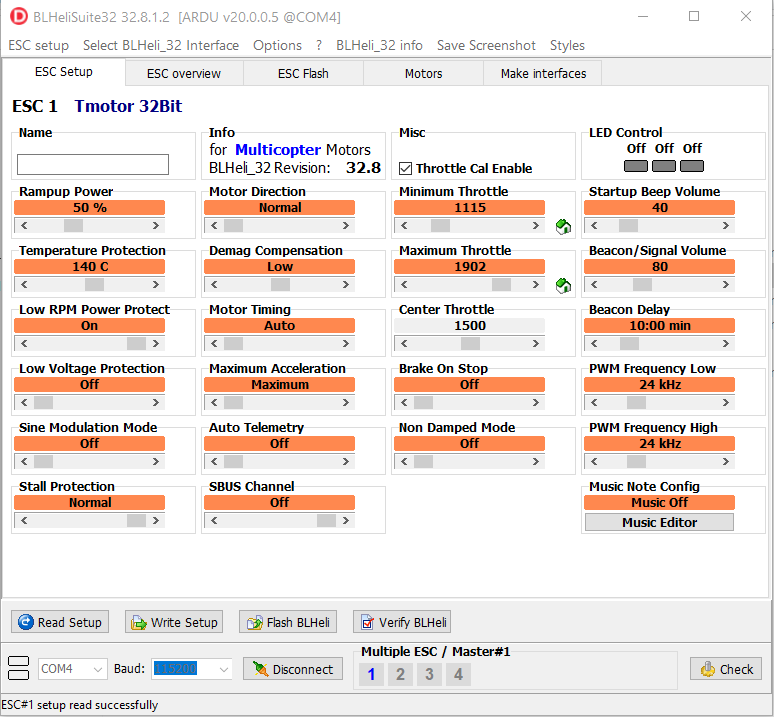
I am with the telemetry configuration of my new ESC Tekko 32 65A metal 4 in 1, all the motors work ok with Dshot150 but the only way that the ESC sends telemetry to the Pixhawk The Cube Black is when I activate the “Auto telemetry ON” in BLHeliSuite, if not, there is no data. Here is my configuration:
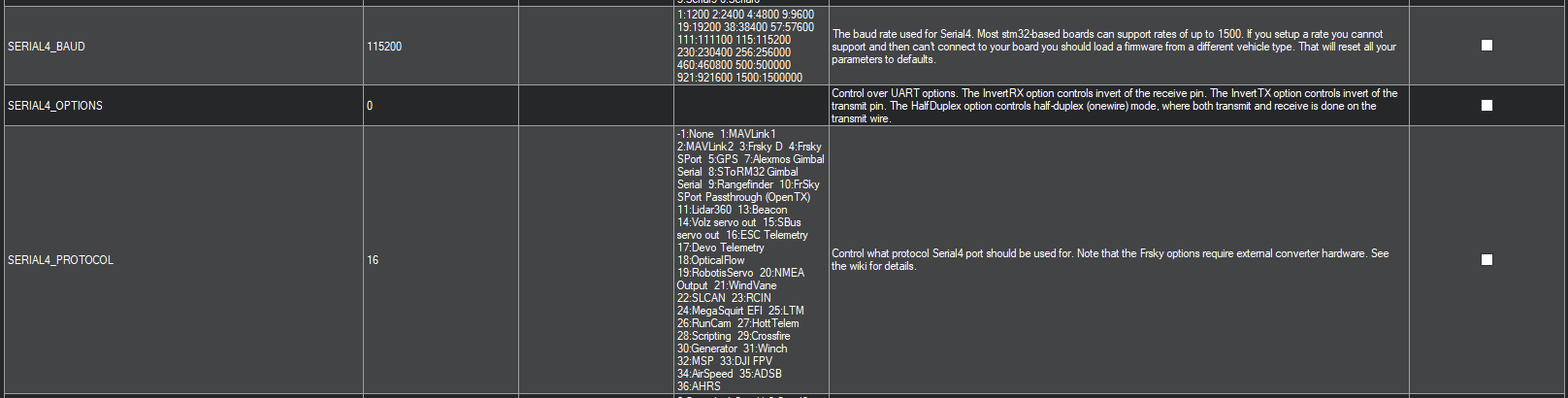
And the telemetry port configurated is the Serial4
There is something that I am doing wrong, but I don’t know it.
Thanks!!
andyp1per
April 8, 2021, 10:47am
2
Try settig the debug parameter and see what output you get
davidae
April 8, 2021, 11:38am
3
Hi @andyp1per
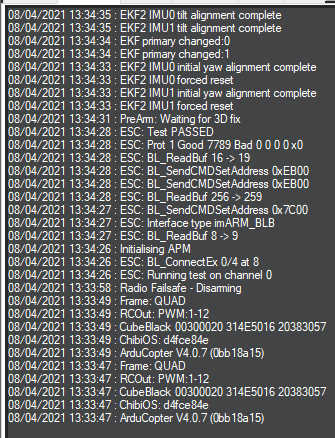
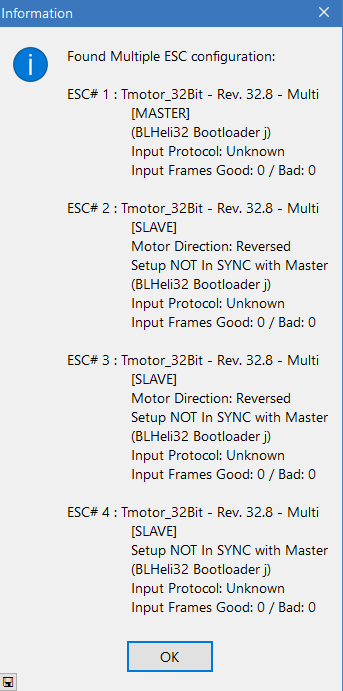
I have set that parameter and SERVO_BLH_TEST to 1 to test first motor, and this is the output:
andyp1per
April 8, 2021, 1:32pm
4
How are you telling whether you have telemetry or not? Its only supported on mavlink2 so you need to make sure your GCS setup supports that
davidae
April 8, 2021, 5:02pm
5
Because in the “status” tab in the latest Beta of Mission Planner I can see the temp and voltage of the ESCs if I activate the option “Auto telemetry on” in BLHeliSuite. But if that option is disabled, all that information is 0.
andyp1per
April 8, 2021, 5:07pm
6
So make sure that SERIAL0_PROTOCOL is set to 2
davidae
April 8, 2021, 5:14pm
7
Yes, that is correct, serial0_protocol is set to 2
RainFly
April 8, 2021, 5:21pm
8
RCOut is PWM1-12.
andyp1per
April 8, 2021, 6:17pm
9
Yes indeed, or set MOT_PWM_TYPE to 4-7
davidae
April 9, 2021, 5:30am
10
andyp1per:
MOT_PWM_TYPE to 4-7
That solved the problem, now MP shows RCOut: PWM:1-8 DS300:9-12 and when I push the safety switch, the telemetry appears.
So thank you very much @RainFly and @andyp1per for your help.
And I didn’t see that parameter in the wiki (https://ardupilot.org/copter/docs/common-dshot-blheli32-telemetry.html#connecting-your-escs-for-use-with-dshot-protocol-and-blheli-32-features ) so I think that it would be a good idea to make a mention of that.
MrNams
December 2, 2021, 12:43pm
11
Even after this change its not working for me
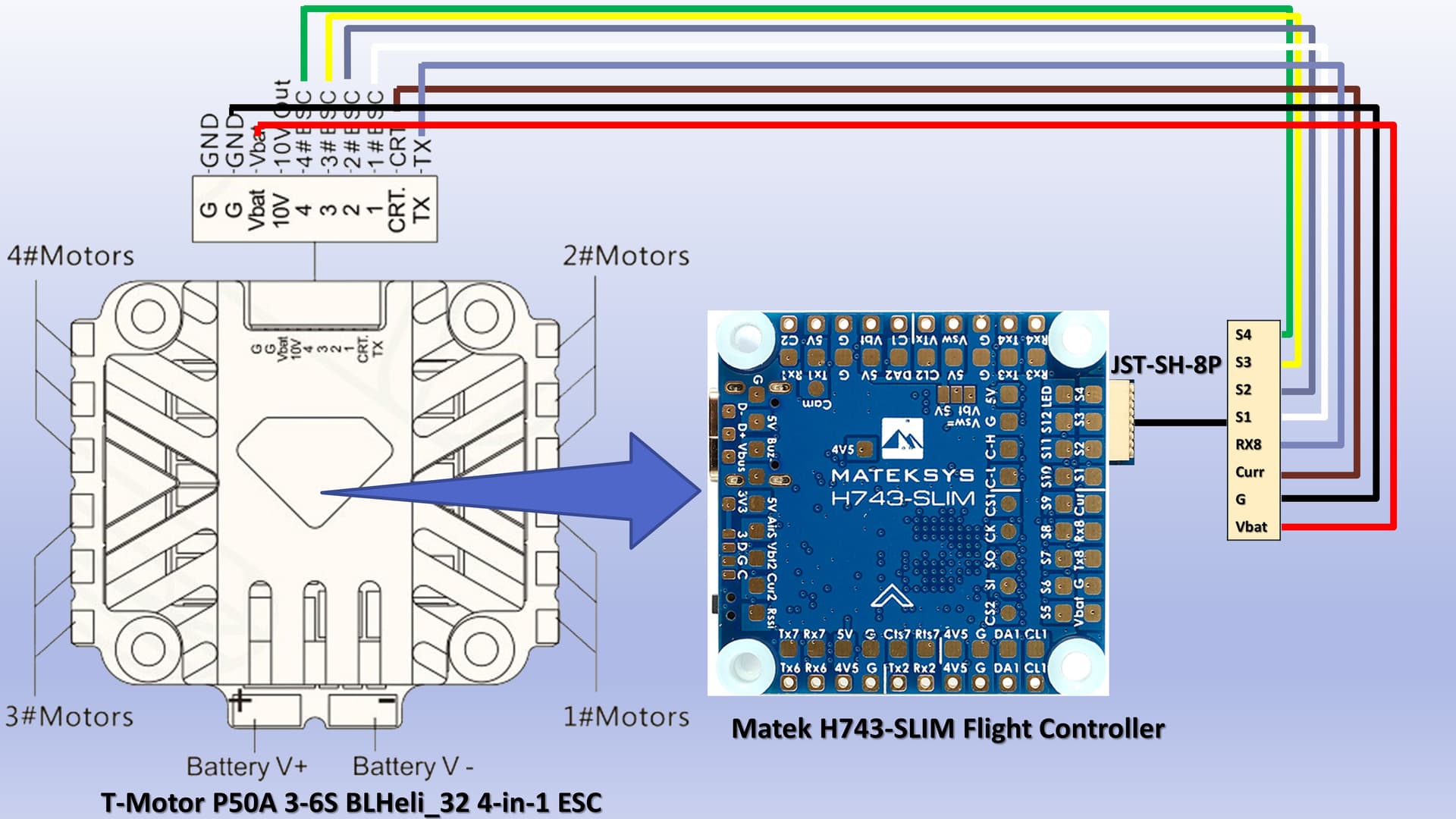
Flight Controller:Matek H743-SLIM
ESC:T-Motor P50A 3-6S BLHeli_32 4-in-1
Parameters i set are MOT_PWM_TYPE=6 //DShot600 SERVO_BLH_AUTO=1 SERVO_BLH_MASK=0 SERVO_BLH_OTYPE=0 SERIAL5_PROTOCOL=16 //ESC Telemetry BAT_MONITOR=9 //ESC
Also sharing complete parameters
Shared with Dropbox
andyp1per
December 2, 2021, 1:27pm
12
Your settings look right to me - maybe check the wiring? I have a very similar ESC with that FC working fine
MrNams
December 2, 2021, 1:28pm
13
I have been flying it with iNav for last one month, switching to Ardupilot and facing these issues, i solved all other issues only this is remaining
andyp1per
December 2, 2021, 1:29pm
14
Ok, what is not working? Please also share your BLHeli settings
andyp1per
December 2, 2021, 1:44pm
16
And what do you observe that means its not working?
MrNams
December 2, 2021, 1:52pm
17
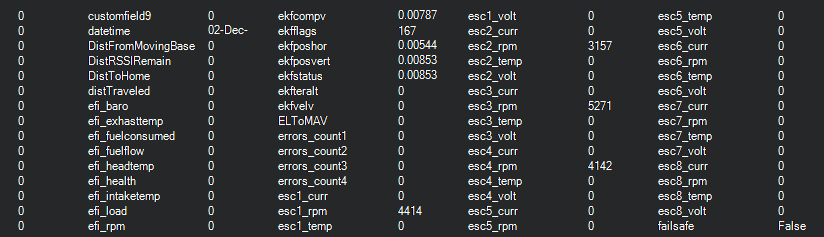
Its not showing battery voltage and current
MrNams
December 2, 2021, 1:53pm
18
Can you share your params?
andyp1per
December 2, 2021, 1:56pm
19
Does it show RPM?
Here are params from a copter flying with Lumenier HD Lux and T-Motor F55Pro F3
Chimera7-Tuned4.1-FinalCut.param (25.7 KB)
Are you using 4.1? You should be.