My quadcopter crushed during Autotune on copter 3.6. Was looking like during the pitch tuning quad “has lost control” and flip over. Afterwards it was trying to recover horizontal position but finally it crushed. If anyone can interpret the logs I would appreciate. I have my thoughts but I would like to ask some professionalists. I can add that my quad is about 16kg with 2x8000mAh 6S in series (normally I use 4x8000mAh but due to small accident I had to use just two) and size of the frame is about 130cm. So please help.
https://drive.google.com/open?id=18bTqOSnYZNT-V7fyaRN5zN6jh0UaXXsE
https://drive.google.com/open?id=1x9V1juvuMzLb7myrimGDTtJbp-cZz6-0
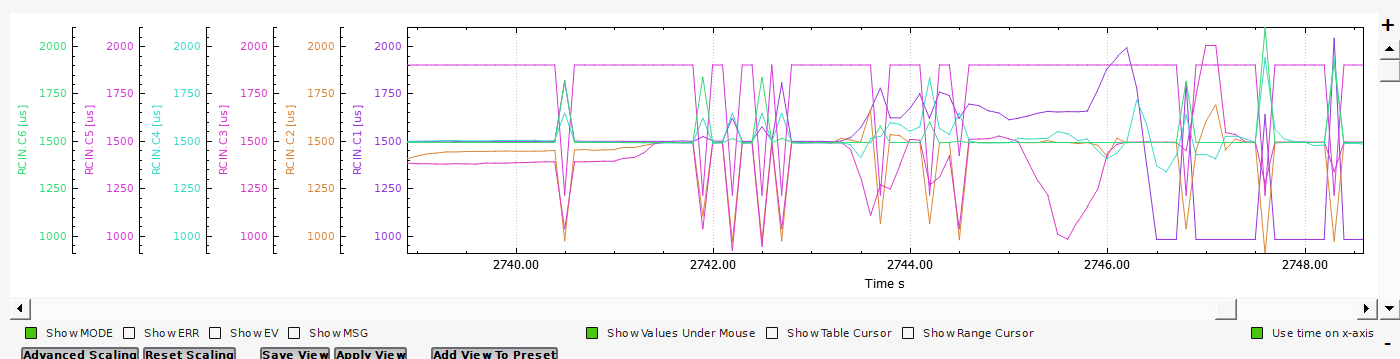
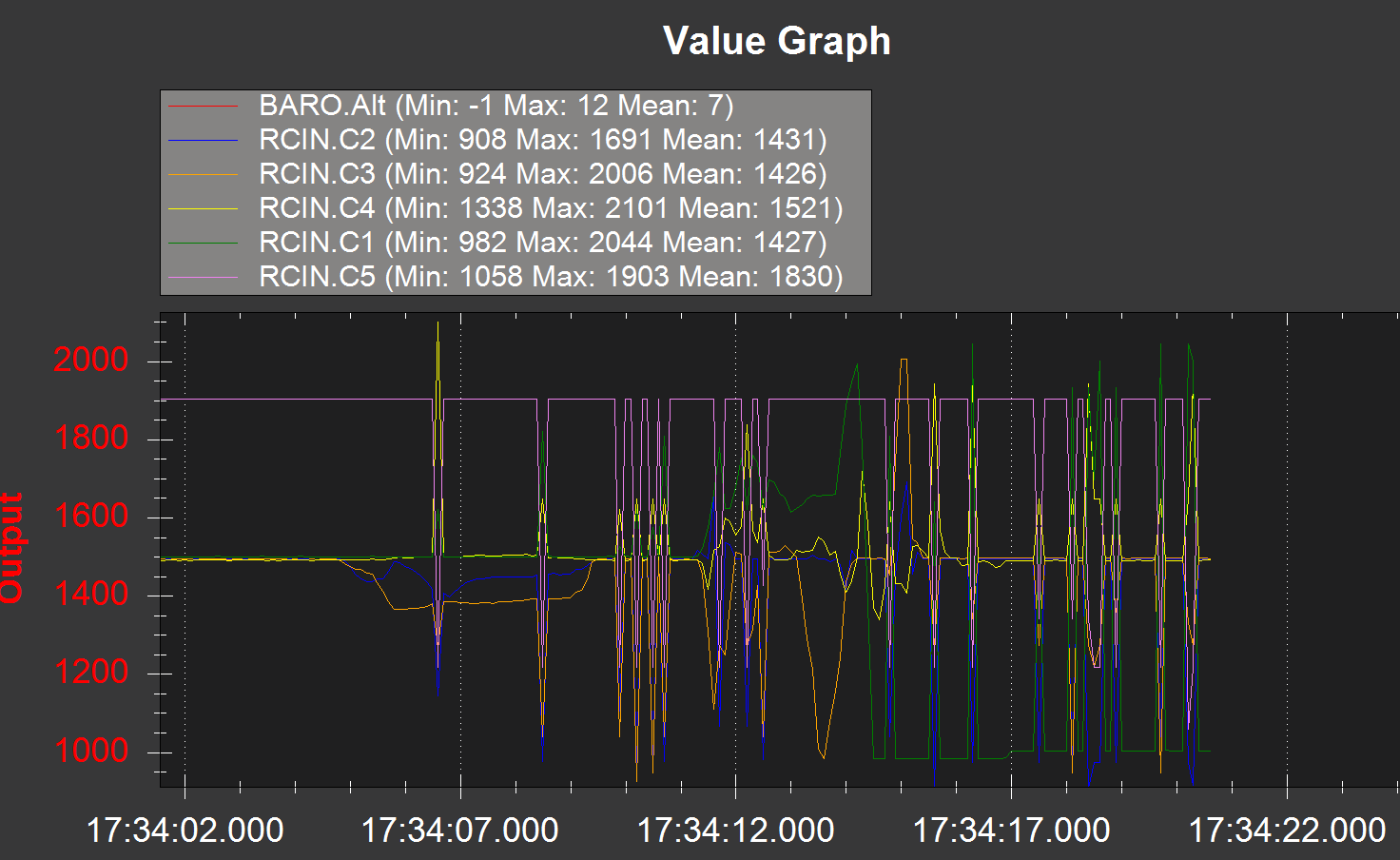
Your RC receiver went haywire, either it started to get failsafe or just simply went nuts. RC8 went above 1800 which was set for emergency stop, so motors stopped as commanded.
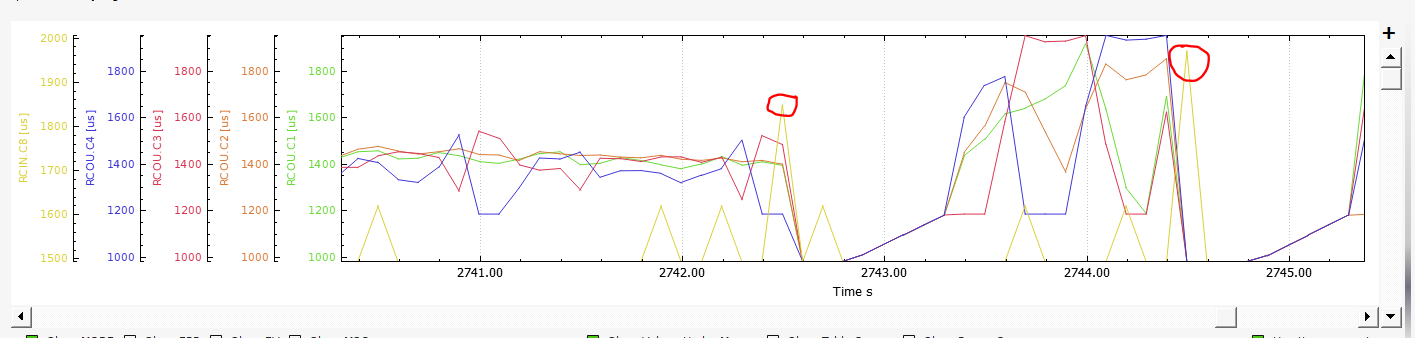
Other channels as well become erratic…
I think it was a receiver failure.
Thank you for your analysis and your time EosbandiAndras Schaffer. These PWM spikes can’t be from position corrections?
I might be wrong but it was a bit windy and I had to correct position of the quad frequently because trees were around. And as you can see Channel 5 (flight modes) PWM changes only where these spikes are from other Ch 1, 2, 3 and 4. I admit PWM goes over the max range (2006us that was max for channels from 1 to 4 for RC receiver) sometimes and I don’t recall I was working on my transmitter sticks that aggressively.
Failsafe I have set for 975us and PWM min was 982us for throttle. Throttle max first spike was when I was trying to go up, when I noticed altitude drop and flip on the air of my multirotor and I tried to make the crush softer, when position of quad was upright for a while and I put throttle max up. Channel 8 (Emergency stop) that was me when quad hit the ground.
By the way what is the name of your app for checking logs? Mission planner is not that handy like your software.
Before I started flying I was trying to connect FrSky FLVSS LiPo Voltage Sensor With Smart Port but due to rush I made terrible mistake and I connected two Lipo batteries balancers together like they were connected in parallel and afterwards I was trying to connect main LiPo plug in series and obviously I made short circuit and one of my XT90 plugs melted (I have 4 of them on my build) and that happened when this voltage sensor was connected to receiver.
So you it might be true. It might affected the RC receiver as well somehow.
I would like to hear more people so dear collegues please take a part of this thread and please advice.
Thank you again EosbandiAndras Schaffer. and thanks in advance for others particypants.
This is not from intentional correction. Value jumps between max and min within a couple of milliseconds.
The first motor stop was before the copter flipped. (check with roll and pitch values)
It is a faulty receiver.
The program is APMPlanner 
I wonder if that can be caused by this lipo voltage sensor connected to the RC receiver through smart port or it is the receiver is faulty. But better I will test it on something less expensive then my big quadcopter. Lucky me during this crush I broke only two props and landing gear, nothing else. I have to think for some buckup receiver maybe FrSky RX8R Redundancy Bus Receiver. Do you know something better and affordable?
Thank you again for help.