I’m in big trouble, please help me out。
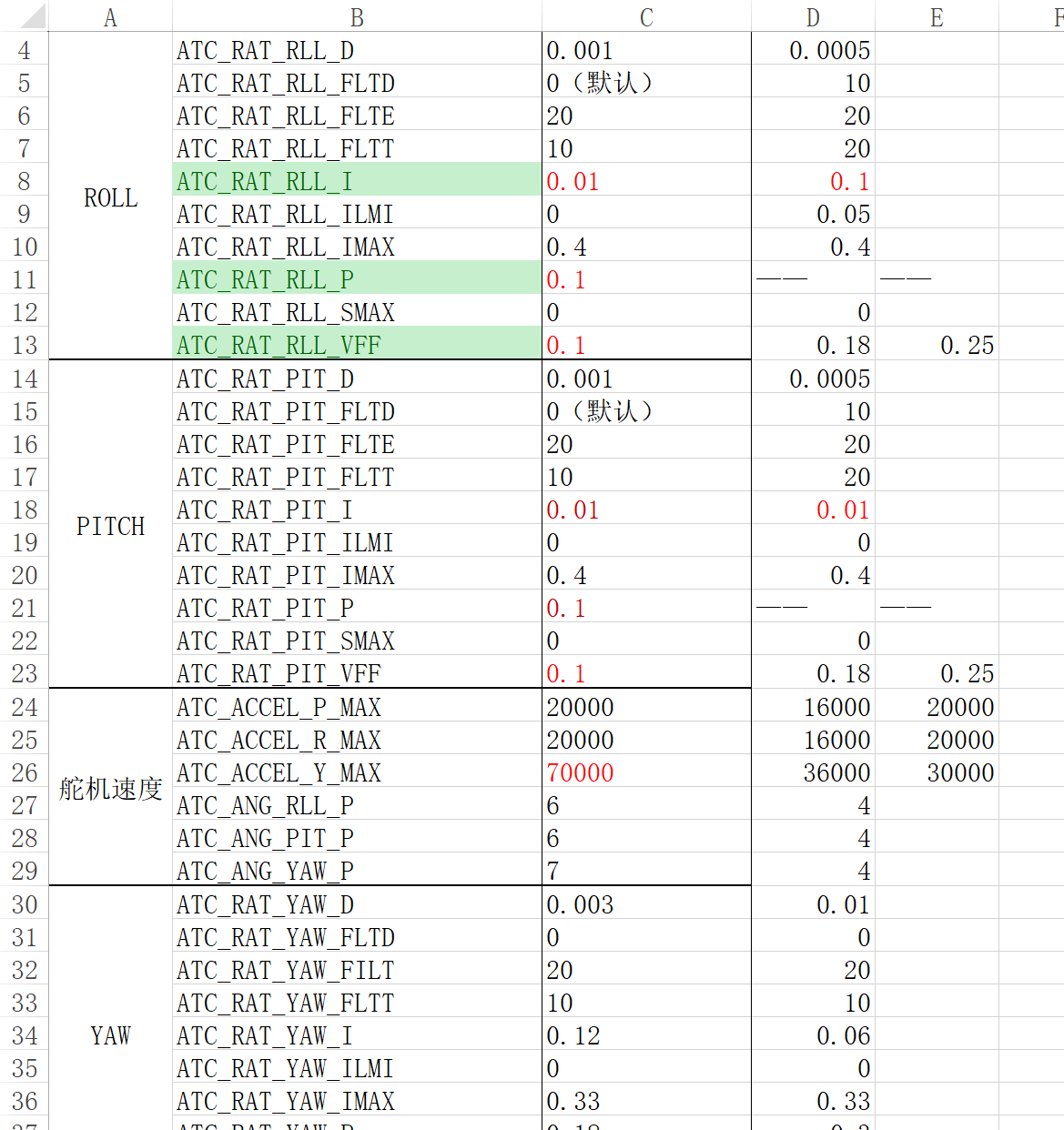
my helicopter rotor diameter is 5.5M ,Maximum takeoff weight is 350kg ,the engine is MZ202. But i do not how to set up ATC_ACCLE_P/R_MAX and ATC_ANG_P/R_P
Please help me, everyone,thank you
I’m in big trouble, please help me out。
my helicopter rotor diameter is 5.5M ,Maximum takeoff weight is 350kg ,the engine is MZ202. But i do not how to set up ATC_ACCLE_P/R_MAX and ATC_ANG_P/R_P
Please help me, everyone,thank you
Nice, a mosquito on ardupilot, finally. Be sure to show is plenty of pics and vids.
This is what ive thought about for a long time, what servos are you using?
just Rocker arm servos ,The most important thing is torque 1000KG/cm
@acef3c i moved this to the traditional helicopter section of the forum. You’ll get better visibility there.
@acef3c are you still in the process of setting up the controller or have you flown it already?
Please post a log or the parameters if you haven’t flown yet.
that is good 。 thank you
i do not know how to update the log
Normally, I do not lower the ATC_ACCEL_MAX values because it’s not necessary, unless you have structural concerns and want to limit the angular acceleration for that reason. These parameters are designed to shape the target response. I use the ATC_input_TC parameter to shape the target response for the pitch and roll axes. The PILOT_RATE_Y_TC is used for the yaw axis.
?? but the document states that it is necessary to set the accle ,and if accle too hight the pid must small 。Because the engine of the plane vibrates greatly 。
2023-05-16 16-01-10.tlog (910.7 KB)
please look at
my version is ardupilot-heli-4.1.5
not have PILOT_RATE_Y_TC
Well that isn’t true. The accels affect the target rate which feeds the rate controller. So making them low doesn’t affect the rate PID settings.
I would suggest that you upgrade to the latest stable. 4.3.7
It would be better to have the .bin file from the flight controller. I will take a look and see if I can extract the information I need from the tlog
Version 4.2.0 or above ,After unlocking, the roll value will automatically shift to the maximum right。then ,The plane will automatically roll over,Crash the helicopter。
if ok,give me your email update the log bin
I would have to look at a log file to see what you are referring to. But the only difference with 4.2 was adding the new integrator feature. If you leave H_OPTIONS set at 1 then the integrator behavior should stay the same as it was in 4.1
I will DM you with my email.
really? if H_OPTIONS set at 1 then the integrator behavior should stay the same as it was in 4.1 。i wll up Upgrade 4.3.7