Hi guys, here i come with another CRASH! Last time heli, now 1350mm frame that we’ve made by ourselves.
Setup: MAD 8108 170Kv motors, ESC T-Motor Flame 80A, 8S Lipo (2x4s), pixhawk 2.1 with latest firmware, H type Frame in ardupilot software
First setup of this drone, on table everything works fine but… first fly ended up with EPIC CRASH!
I’ve armed motors (on althold mode) and add just little throttle to launch, when drone lifted just about 20cm make an epic frontflip and crashed… the only RCin was throttle, why he flipped? To be honest i’ve got no idea how to read LOG’s, pls help
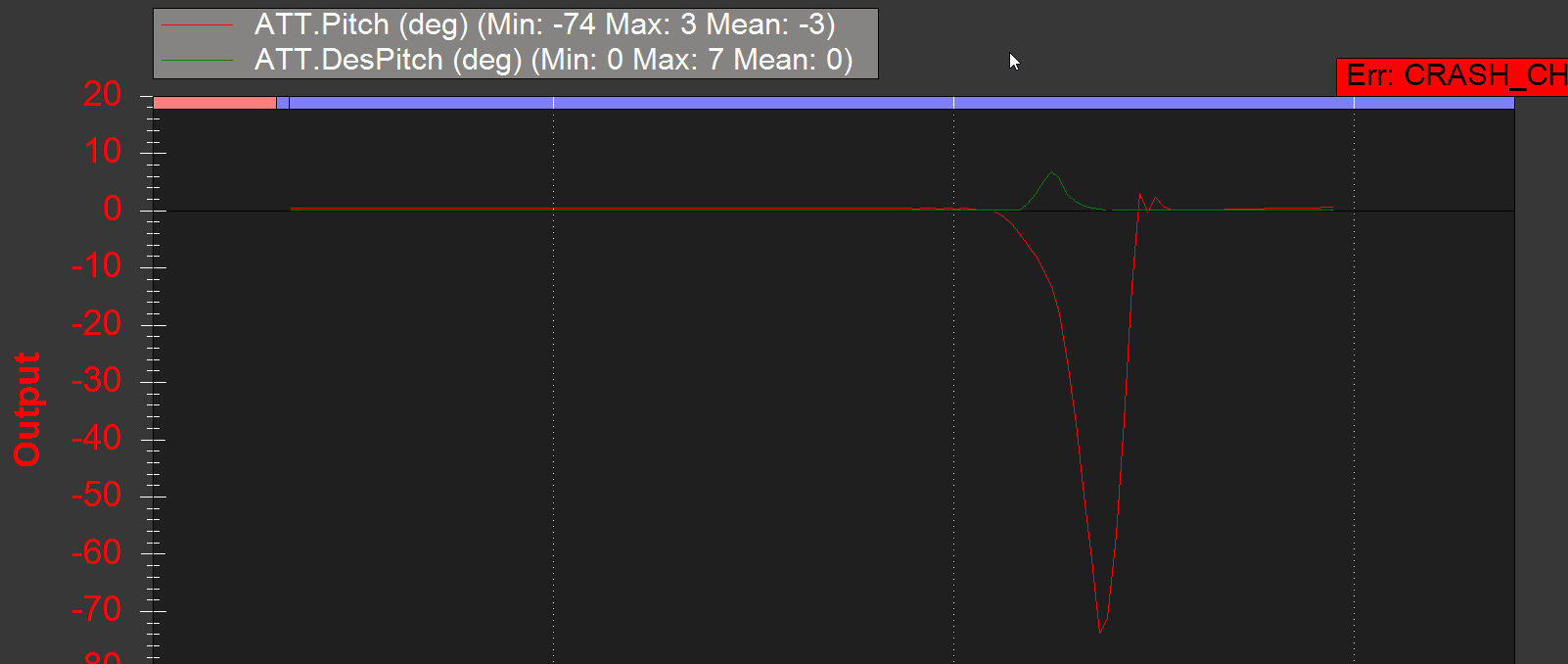
In your explanation you describe a front flip.
I am assuming by this that the quad flipped forward.
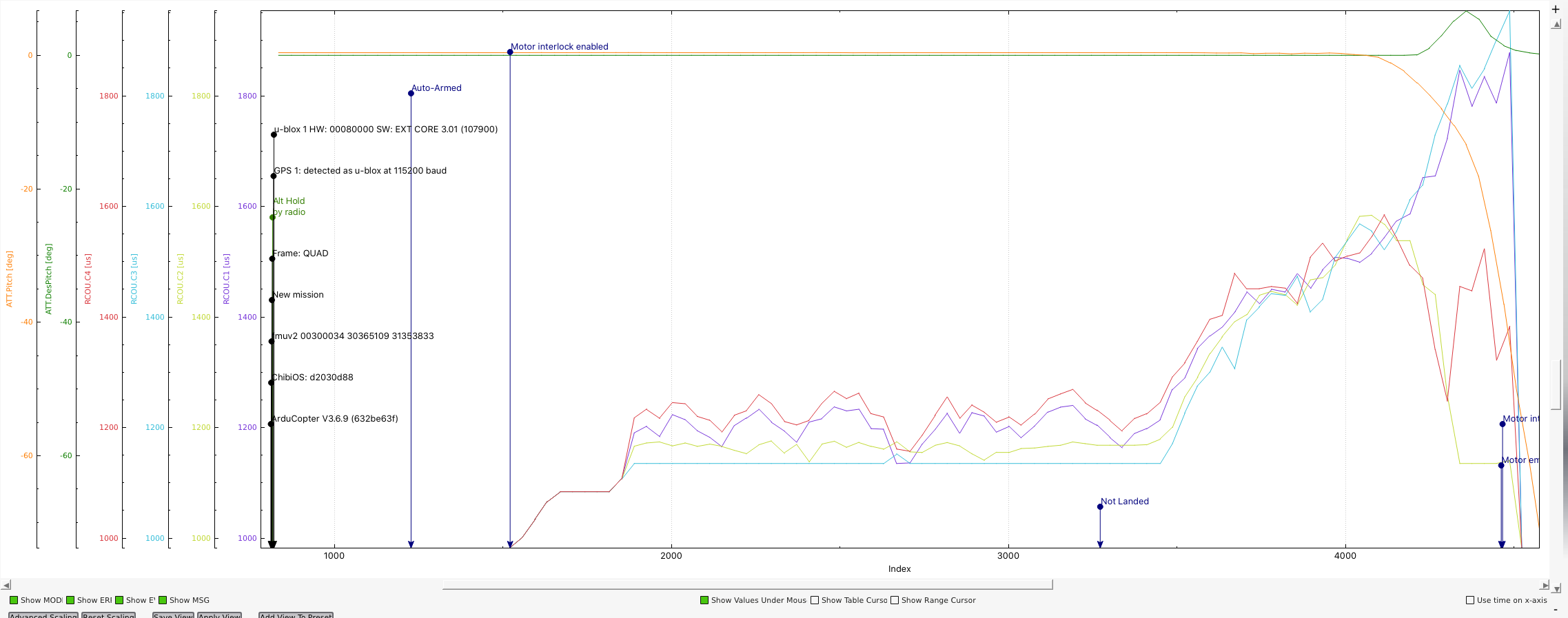
Looking RCout I see motors 1 & 3 go high which are the front motors.
This is in response to the FC telling them to do so.
Is the FC pointed in the right direction?
Is your motor order correct?
Before flying, connect to ground station, either via USB or telem radio. Hold the craft up and move it around, observe the HUD and see if it exactly matches your physical movements.
You can also rotate and see if HUD compass/direction matches reality, and that it stays consistent after several rotations.
If everything seems fine, and everything that Mike Boland mentioned has been checked, you could hold the craft up again, arm in Stabilise mode WITHOUT props, and make some careful rolls and pitches observing which motors speed up or slow down to try and correct - this might give some clues if there’s still something wrong.
Damn u guys, you’re right xD
To be honest i was 100% sure that everything was fine
IT FLIES! but like shit xD I’ve started the motors, put throttle up and it has so much oscilations that i had to put it down. Can you look at logs and params if you have any sugestions por some really basing tunes values for this baby?
Because the default PIDs are based on smaller aircraft, a “big ass” aircraft is going to need some tuning. I ran into the same issue with a 1000mm quad.
Read this: http://ardupilot.org/copter/docs/autotune.html and pay particular attention to step #6:
"For large copters (with props at least 13inch or 33cm diameter) set the Rate Roll and Pitch filters to 10hz "
With that said, you may want to use InFlight tuning to get roll and pitch “pre-tuned” so the aircraft is stable and controllable before you run AutoTune.
 Last time heli, now 1350mm frame that we’ve made by ourselves.
Last time heli, now 1350mm frame that we’ve made by ourselves.