Hi, I’m also trying to build Chinook.
Is there any update to this project?
Thanks!
Hello, can the code be shared?
I guess I had better throw my hat in the ring as well,

Would really like to take a look at @jasclarke308 configuration, that’s flying quite well!
2 Likes
Wow, a nice one!
I am also having fun with a bicopter using flaps.

I’m currently fighting with a pitch instability, have just crashed it from some 30 meters because of that.
1 Like
How interesting! My project is getting rebuilt this weekend as a result of a faulty ESC. I am converting the copter from betaflight to ardupilot while I am at it. I would love to take a peek at a working bicopter config to get some ideas. Yeah pitch stability seems to be a universal friction point I will be looking into that myself once my unit is back assembled (hopefully by Monday).
Regarding config - this is a nearly default one, nothing really serious to change. Compared to this one, I have decreased the yaw P&I a little because it slightly overcontrols, and the pitch P&I just a little.
2022-07-01-0yaw-tuning.param (20.6 KB)
Funny enough, the flapped bicopters need to swap the left and the right servos, as the default assignment is for the vehicles with side forces applied above the CoG.
The other thing is that the Copter’s code for bicopters is currently suboptimal with regards to pitch and yaw not being the function of throttle, as I found out here. I will try my hands on it a little bit later.
I am looking at your video closely and it seems there is a miscalculation occurring between the pitch of the body with relation to the gyroscopic forces of both rotors moving in the same direction…Would be interesting to pick through the logs on that specific event.
Now that I think about it the guys over at https://rcexplorer.se/forums/forum/everything-about-the-bicopter/ were also discussing a problem with aft reversal pitch behavior as well.
The log of the most of the flights from the video is here:
https://drive.google.com/file/d/1DULZhHoSFwG2qJNjggtgUWJI9oGZXHRr/view?usp=sharing
(hopefully I got the right link). If you point me to an effect I do not yet know, I will be very grateful.
Hmmmm, I am not seeing the final event in this log, what was the timestamp?
Right after 1340 seconds. Here is the APMPlanner screenshot about desired/actual pitches around that event.
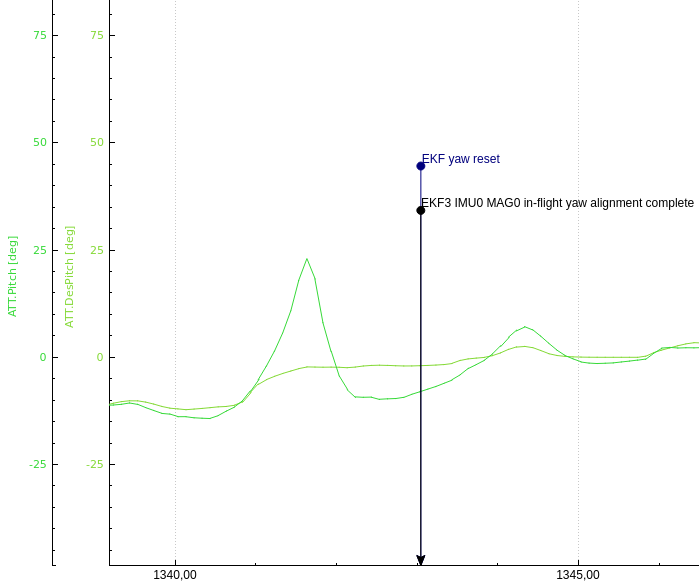
Ah! there it is!
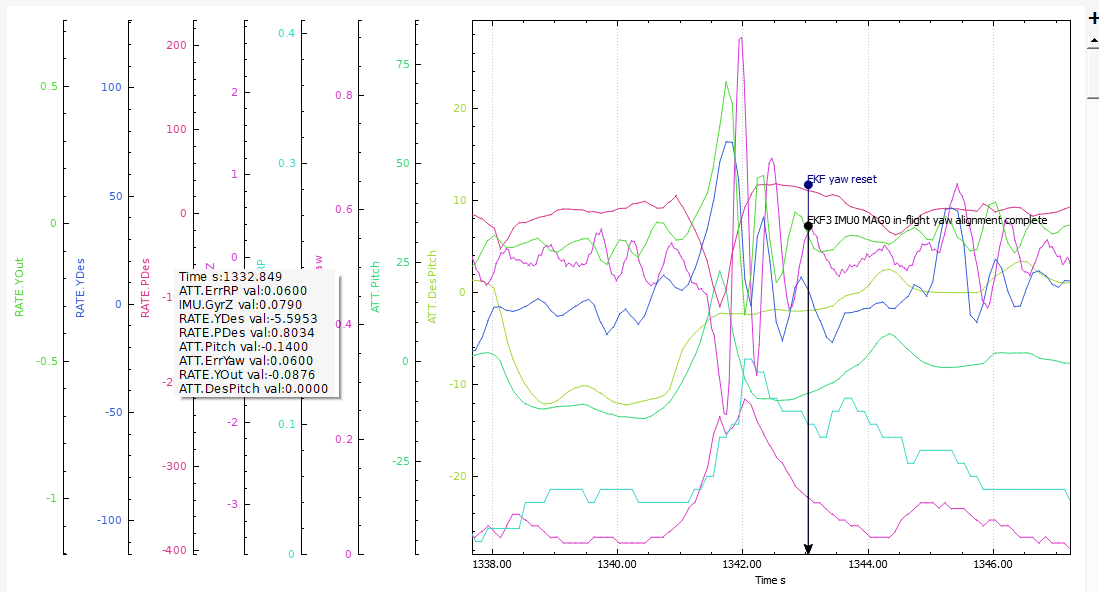
Looking at the timing of the events, it strikes me that this could be an issue of assumed versus actual servo position. Are your rigged for feedback?
Sorry here is one without the mouse over stats
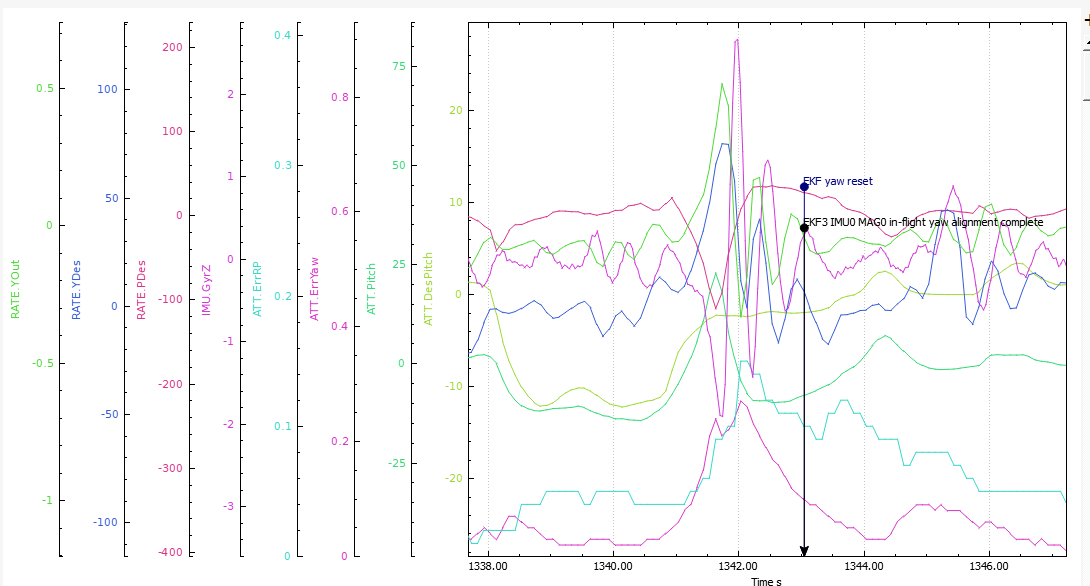
There may indeed be some delay. But somehow I think something else is the main reason, and (possibly) slow servos are just making it worse.
The servos are advertised as “digital”, but I believe the difference is only that they can accept higher frequencies for input. There is no way to get feedback. Being crazy enough, I might mount some camera to look at one of these servos closely, but no idea whether this is worth it.
Alls you gotta do to hack a servo for feed back is solder an extra lead to the middle pin on the potentiometer and run it back to an analog input.
Check this out:
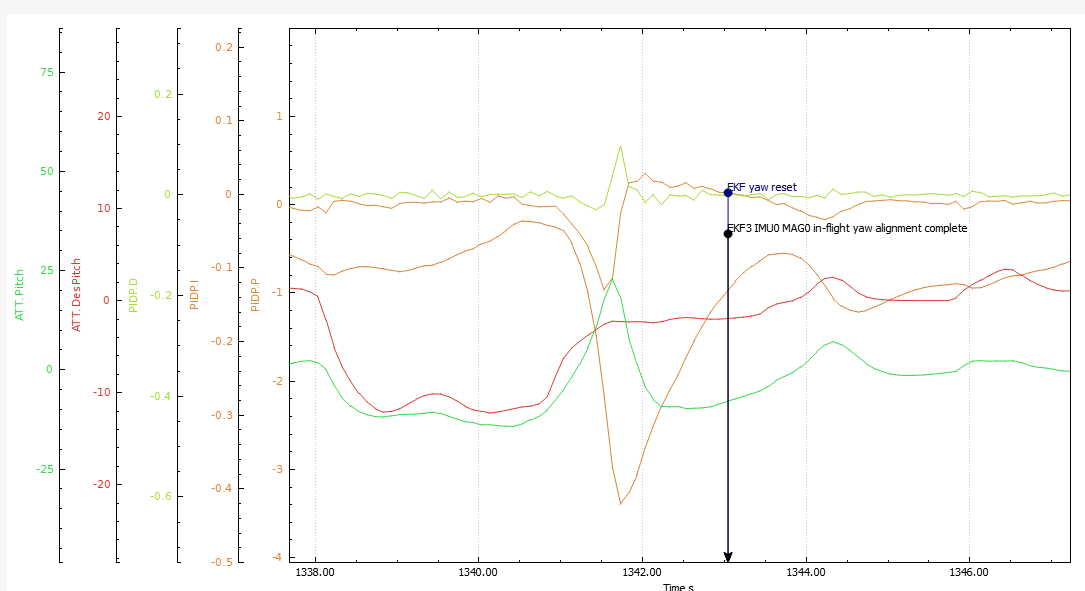
Sorry, what exactly to look at?
The predictive is going overboard during the pitch change, or at least that’s how I am reading the data.
If I get your idea right, this is too early, as the PIDP.Limit is not kicking in yet. I have seen that a lot on my CoaxCopters. Another symptom of that state would be the desired pitch changing despite having no stick input.
Still I have an impression that something nasty happens well before the extreme ranges. Maybe I am still over-actuating the pitch, or the maximum acceleration is set suboptimally.
Anyway, today I have one more flight with at least three similar events (the last ended with a crash), so there is more food for thought…
Well I will be right there with you here when my parts finish printing, that faulty ESC wrecked me bad lol; regardless, I had a problem with the center of mass that needed tweaking.