First time posting here after reading quite a bit of your posts here.
We’re a student team from Stockholm who are building a UAV controlled by the PixHawk 4 and have stumbled upon some problems with the different flight modes. Here’s what we’re working with.
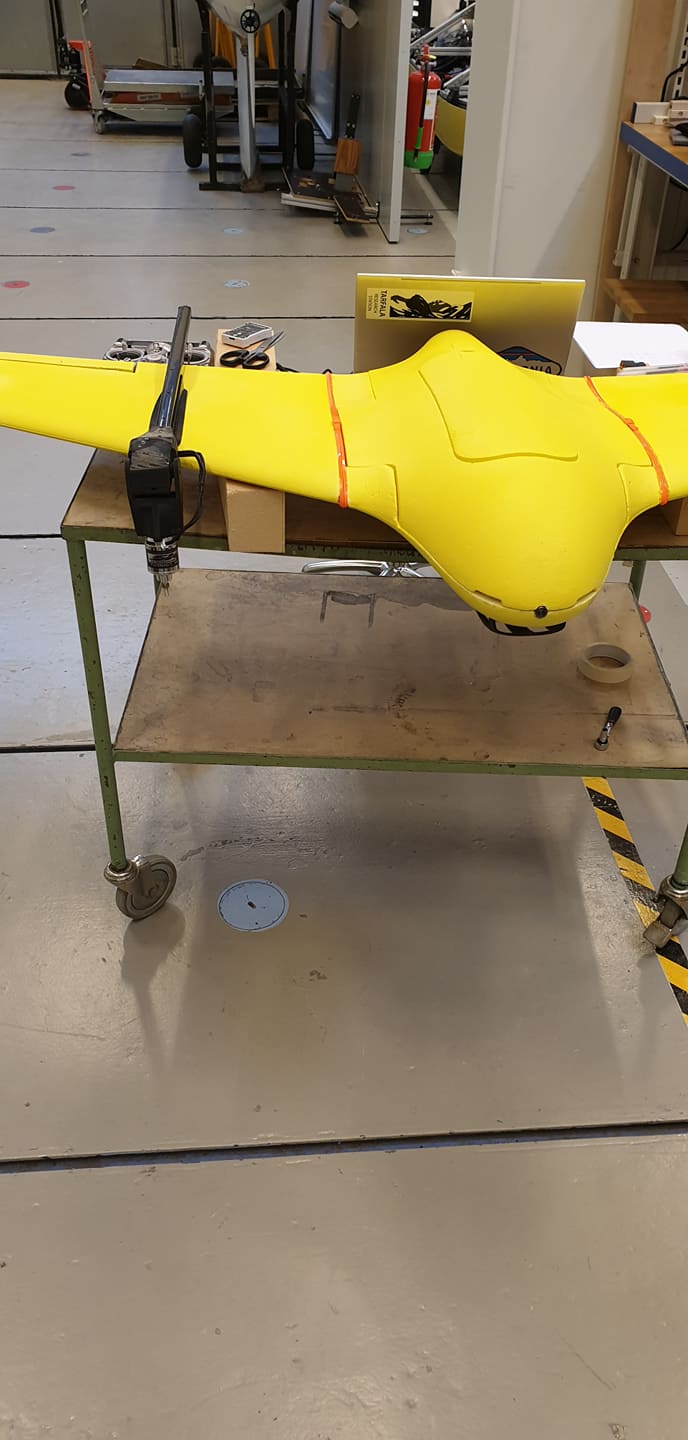
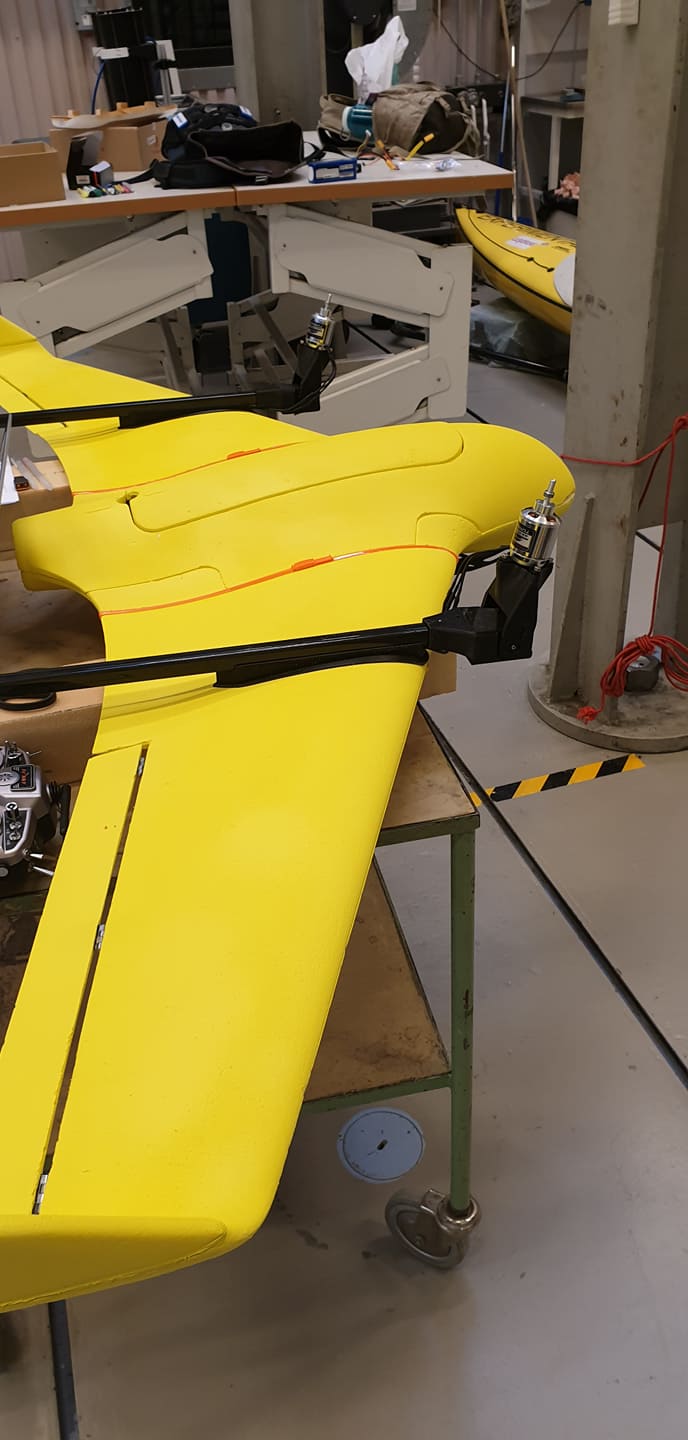
Bicopter configuration with motor mounts capable of tilting in roughly ± 90 deg
Flight modes set to 1. Fly By Wire B, 2. QHover, 3. Manual
Start on ground in QHover, the tilt motors tilt upwards, away from the ground, and we throttle up. The plane gains altitude and behaves as a bicopter.
After the initial take off, we start to accelerate and switch the flight mode to Fly By Wire B where the plane transitions into horizontal flight. When this mode is selected the plane rotates its motors to a forward facing configuration after the correct airspeed and angle is achieved.
For landing the planes airspeed is lowered to where the angle of the wing body is high and it is flying close to stall speed. Here we switch back to QHover to land vertically.
Pretty basic! We’ve achieved this stable behavior before with exactly the same parameter as are currently on the Px4. But, before our first test flight of the take off procedure we simple couldn’t get it to behave as before. Instead we got this behavior:
The plane tilts it’s motors upwards when in QHover as before but now they move from +90 to -90 degrees extremely fast. They seem to react strongly to yaw input.
In both Fly By Wire B and Manual the motors tilt down towards the ground (-90 deg) and stay there no matter the orientation of the plane.
Sounds like you have a issue with the trim position of your tilt servos. They should move to trim in all forward flight modes, manual is the best mode to test this in.
The trim should be set so that in forward flight modes they point forward, as I say try this in manual.
Looking at the vid they seem to be moving in the right direction, probibly just a issue of gains. you could try reducing Q_TAILSIT_RLL_MX we have recently reduced the default on master to 1.5 or 2.
According to one of our team members, who is in the lab still, changing Q_TAILSIT_RLL_MX doesn’t affect the planes behavior much Appreciate the advice though
Today when I went by the lab and plugged the battery in the plane behaved as previously wanted. Later during the day it stopped behaving stable and we were back to square one. Is there a proper way to boot up the pixhawk? Very strange.
We did switch between vectored and continuous to make sure it was the case and yes, the behavior did return. I believe that the fast change of direction in vectored mode caused our not so stiff body to oscillate. I might be wrong but that’s my consensus.
In continuous the tilt arms move much smoother and allowed for a stable hover.
First test flight of this configuration we forgot to do a proper pre-flight check and the rear motor was spinning in the wrong direction… It flipped and we lost both winglets and a propeller. Always check motor/prop orientation!
Edit:
Due to the bicopters sensitivity to crosswinds we decided on trying a tricopter set up. As we haven’t flown it yet we haven’t been able to test the differences but I will update the thread soon enough.
We were always on ardupilot but somehow confused px4 with pixhawk 2.4.8… At some point after this was posted we considered moving over to px4 but never did due to time constraints.



 Appreciate the advice though
Appreciate the advice though 
