Can’t remember, should report RPM on debug - but the mechanism has changed a lot
Don’t fly with debug on!
Ok, will turn it off and go out 
Attached the log from mavproxy, I also see some e>0 when the motors are used for beepingESC RPM log 2021-06-10.txt (691.3 KB)
Got it flying
Have not made any tuning yet but it worked pretty well mainly hovering in loiter mode.
Ended the flight with some short flying around, unfortunately ended with it drifting in all directions and was resolved by getting back into stabilised mode.
I don’t think that is related to this fw. Suspecting my compass.
One thing I noticed is that I have “all time low” vibrations, most of the time around 2. Have earlier had a hard time getting below 10. The frame is the same, have though replaced props during the winter.
One strange thing was that after each flight I got an error message about “AP_Logger: stuck thread (write)”. Happened after landing and disarm
Attached link to log from one flight. https://www.dropbox.com/s/zruzce41y2xh4w1/log_115_2021-6-10-21-36-44.bin?dl=0
Ok I have one now, so I will see if I can reproduce anything with the logging. One thing to note was that I had to make all of the TIM8 DMA channels unshared as otherwise I got a regular watchdog. I’m not sure why this was, but possibly related to the CPU load and that this is only an F4 - it could be that logging is the same, just a lot going on.
I had another test today, no issue with the logging. Might have been the SD card, I cleaned it before running today, have seen before issues if there are a lot of files already on the card.
1 Like
Did revert back to default settings on all control parameters, made a long hovering session in both stabilized and loiter. It was pretty windy and I have not done any PID-tuning yet.
Looking at det ESC part of the log there are a few errors, is that as expected?
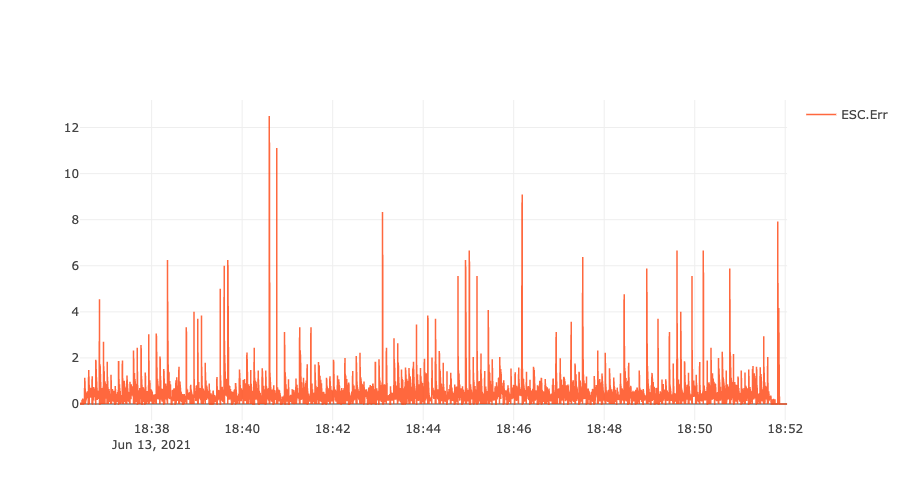
The complete log can be found here:
Some errors are to be expected especially at higher rates on less powerful controllers.
Hi, do you know if your fix made it to the beta5 release?
I have tested b5 but are missing the parameters related to bidir DSHOT such as servo_blh_bdmask, same in master
1 Like
The fix is in, but you need to use the -bdshot firmware to get these parameters
Thanks, make sense, will try that
did neopixel support have to go in this?
I see a difference in the version I got from you that support neopixel leds and the Beta5 and master that both doesn’t seem to support neopixel with the bdshot version
Neopixel support was not removed, only display support was removed.
Strange, my finding is
The zip file you provided in this thread have both led and bdshot working
4.1 Beta5 : led works, bidirectional does not
4.1 Beta5_bdshot : led does not work, bdshot works
4.1 latest 2021-07-02 : led works, bdshot does not
4.1 latest_bdshot 2021-07-02 : led does not work, bdshot works
Matek 405 CTR
Thanks for your help
No problem, just letting you know
Which output are you trying to use LEDs on? Does it show as LED output on the RCOut message? It could be a DMA allocation issue since I slightly changed the allocation on this board.
It reports
RCOut: DS300:1-4 PWM:5-6 when it doesn’t work
RCOut: DS300:1-4 NeoP:5 PWM:6 when it works
SERVO5_FUNCTION = 120
Yeah ok, this is my fault. I disabled DMA on PWM5/6 so that USART3 and UART4 got full DMA. LEDs require DMA. Is there a particular pin on this board that is dedicated to LEDs?
They have two options but PA15 pin S5 is suggested if i2c also is used
http://www.mateksys.com/?portfolio=f405-ctr#tab-id-8
Hi,
I’ve just started to use Ardu and my only experience has been with Pixhawk systems which just work. I’m getting more adventurous and wanted to try a 5" with Ardu to try out all the features on a cheap platform.
I’m having trouble getting motors 1&4 to spin. It appears they are not getting signal as on the startup tone they don’t chime. If i swap signal wires the other motors chime and spin. If I use betaflight they all spin. I tried wiring to motor pins 5&6 and still no functionality.
I’ve followed the wiki and have set up SERVO_BLH as instructed. Using BLHelisuite32 it only finds ESC 2&3.
The motor test tab only spins 2 motors and if I arm with the Tx I can only arm 2 motors. I have also tried Dshot600 and reverted back to Dshot 150.
Attached is my parameters.
Kakute F7 mini V2 with Tekko32 F3.param (18.0 KB)
Any help or advice would be great. I’m not sure if this is the right spot but i’ve seen the Kakutef7 type of boards mentioned a few times.
Regards,
Josh