Hello everyone,
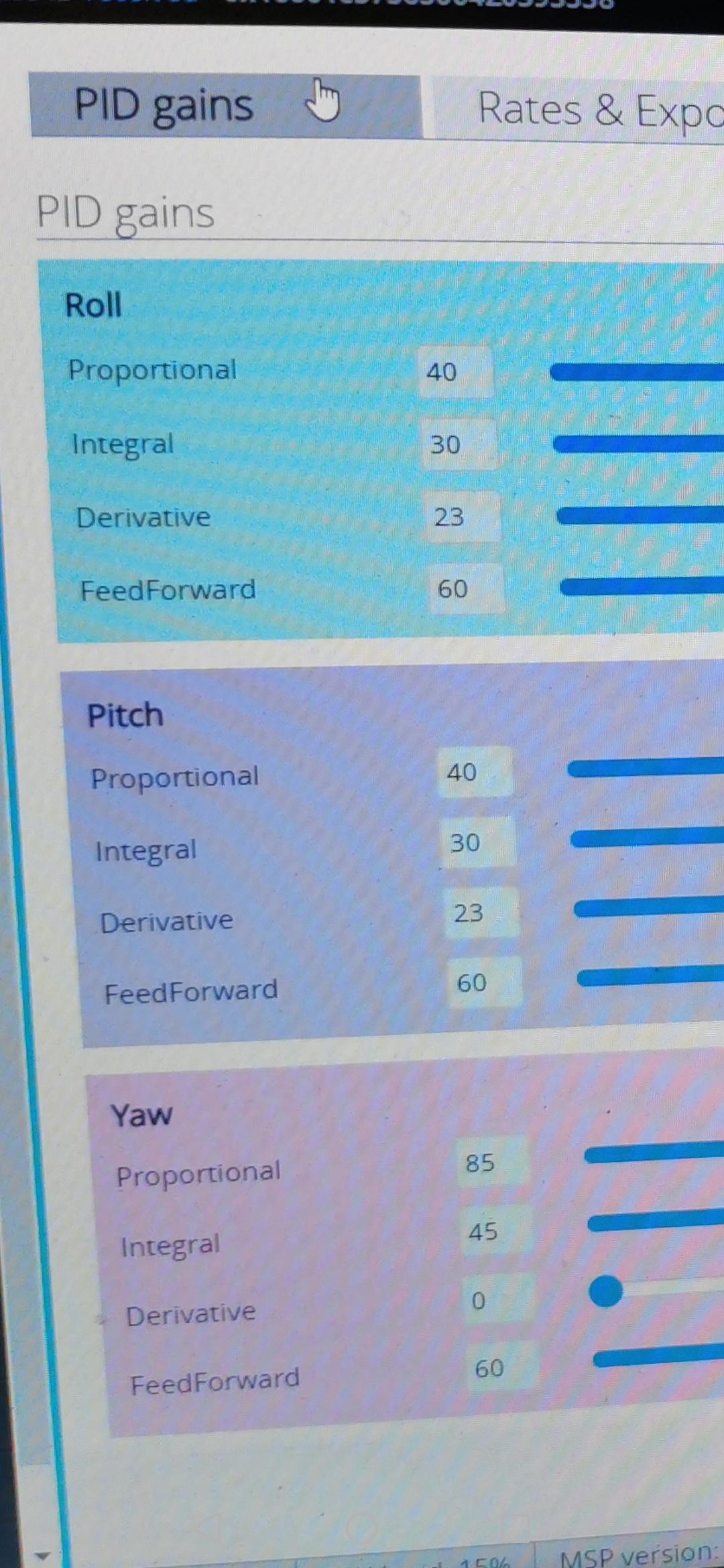
I recently switched from Inav to arducopter and arducopter stock PID not suit my quad, ones I got previously on Inav wer perfect but it doesn’t look like the same kind of values (there is a picture of my inav settings)
Is there a way to “translate” PID’s from Inav to Arducopter PID’s values?
If you describe your quad in detail, maybe we can suggest a starting point, then there is some tuning procedures to follow. With Ardupilot there are so many different choices and hardware possibilities that tuning is not a simple few mouse clicks and couple of test flights (but it can be when you are experienced)
After the calibrations, set up voltage monitoring then use MissionPlanner Initial Parameters to put in place most things you need to do a test flight and start adjusting PIDs for stable flight.