Today I almost burned my finger, after running for ~1h Hitec D845WP servos were darn hot! And it’s not even enclosed. This made me think, whether some additional heatsinks or even active cooling should be attached and how does the heat impacts it’s performance and longevity.
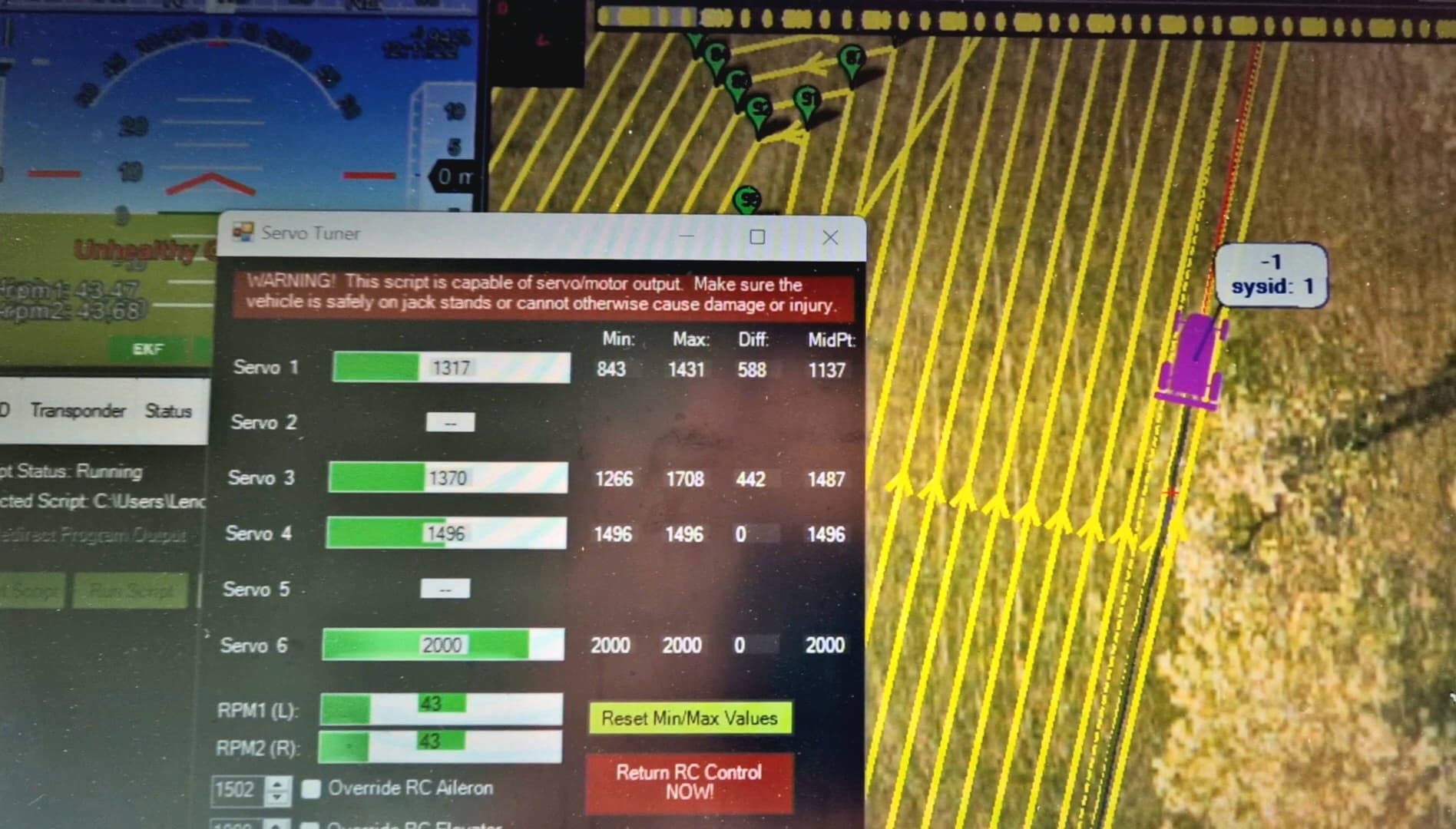
On the side note, after additional fine tuning and alignment of RPMs on both servos, this had a significant impact on the straightness of the driving lines. I have slightly modified Yuri’s servo tuning script and included progress bars for RPMs. Wanted to include auto-tuning mode as well, since wheel encoders I had installed permanently, but eventually decided that re-alignment is not needed that often hopefully. Tuning script is very handy, thanks @Yuri_Rage.
And it did not take long till one of the Hitec servo’s seized. Highly likely due to the overheating,part of it’s internals is melted. A few degrees warmer day, slighly longer mowing time and that was enuogh to kill it. Did that happen to anyone else?
Might need to think of some active cooling options.
Well Marius it is not good that you burned up a servo. I run the same Hitec D845WP servos and I have run them for a few years now and I haven’t fried one yet. I have also run my mower on days where the temperatures were well over a 100 degrees for 4-6 hour stretches with only one stop for fuel. In my case the servos are mounted right next to the hydrostatic control valves, the resistance springs are removed, and none of the original linkage is connected.
My guess is that in your specific application for some reason, the servo is being required to exert more force and work harder. Another situation that often kills servos is to have them push into a hard mechanical stop because of the way they are adjusted. If the servos are adjusted correctly, it would appear they are being worked too hard. If that is the case, your only option is to get bigger servos.
Where I burn up servos is on the application to control the gas engine throttle. That is a harder problem than you would realize due to a big spring on the engine speed control governor.
Setting up the engine throttle servo to go over center at the stop point, is a great idea. Plus, I think the cheap 25kg servos I an trying to use on the engine throttle are a little small. They do fry up nicely though in this heat.
You will also be interested to see that I have adopted your shade approach as one of the measures to manage the heat on the mower electronics. For now I just have this “Bonnet” clamped on the mower but longer term I am going to put a big metal plate up there for shade with all the antennas mounted on top of it. This mower is a work horse and it is also driven by a Alien when I am not sitting on the seat marking GPS coordinates. The Alien drives better than I do anyway, and he isn’t bothered by the heat and dust so much.
Steve, your points are valid, but judging by the low current draw of just up to 3A, sometimes maybe 5 (total for both) during the run, neither physical limits nor high load should not be the reason. Yet servos are getting too hot for a touch. The only reason for that, that I can think of - servos are too close to the engine (2")
It sounds like a tricky problem but maybe you can figure out a way to shield them from the heat and get some air flowing on them. Not much is straight forward and easy on these mowers!
I’ve noticed that the D845WPs tend to run a little warm, even at no load. I think they apply a pretty strong hold current. My impression of them on my own mower was that they were barely up to task, operating pretty commonplace Hydrogear transaxles with the springs disconnected. They absolutely did work, but they would suffer little abuse before failure (of which I had 2, one of which can be blamed solidly on me).
I’m now using AGFRC 100kg 12V servos (now updated as 16V servos in later models). They have served me well, as I stated above, but they seem to suffer from quality control issues, so it’s hard to wholeheartedly recommend them as alternatives. I know others here run them, also, and have experienced similar crib-deaths as I have.
Bench testing shows they exceed their expected torque rating, and speed/accuracy are outstanding at 24V. I cannot vouch for longevity in a hot/dusty environment. The disadvantage is that they are HUGE.
Hi,
What 4.3 beta version are people using (seems most stable).
I have been using 4.2.3 but getting frustrated with a wobble issue similar to that on John Eastons boat (except mine is a modified yardforce robot lawn mower). I want to try s curves etc before looking for help.
You should stick with 4.2.3 until a stable release that fixes the issues with the position controller in later versions.
John’s problem is unlike yours because he’s using a newer version (with which he’s struggling, possibly because the newer nav controller is difficult to tune against slow and/or non-linear response).
The new nav controller will likely exacerbate your problems rather than solve them. It’s close to release, which will likely be 4.4, which is in beta now. Recommend waiting for it to go stable while you solve what are likely not nav-induced tuning issues.
Hi Christopher,
I am curious about your comment regarding isolating your ESC from the flight controllers. Can you please share details on how to do this because I have fried many things with my ESCs and I don’t understand why.
I electrified a 30 year old 42” lawn tractor and had all sorts of problems blowing up the devices that sends the PWM signal to the blade ESCs. I first used an Arduino to smoothly throttle up the blade motors with a push of a button, but after a few attempts, the arduinos would blow up. I then tried servo testers. The same thing happened. I soon realised that the ESCs would send upward of 35V back through the 5V PWM signal pin, thus frying my devices.
I, of course, have no idea what I am faced with so with the use of a large 15k resistor and high powered diodes, I have protection, yet can get the PWM signal through. There must be a better way so any advice for isolation as you mentioned would be wonderful. Mostly because I will learn something.
The mower works great though, 12 fried devices later.
I run 16s lifepo4
Thank in advance,
Christian.
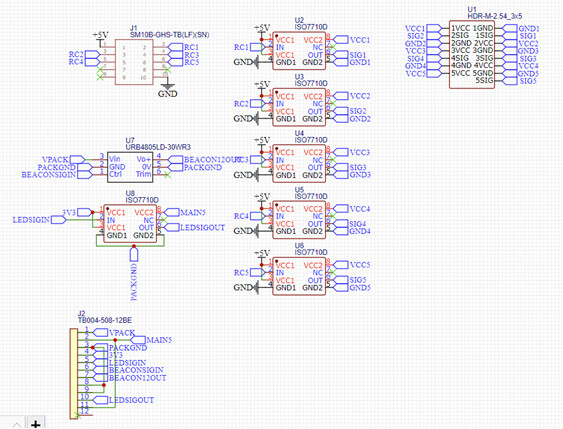
@C_Alexander I gained my understanding of this problem from the “Avoiding Ground Loops” section of the manual for the VESC, here VESC 6 75 (see “Manuals” section, 250.pdf, page 5). There are probably other good descriptions of the problem out there.
I’ll throw out here that the Toris Servo from Gearwurx has worked excellent for me. Torxis Servo, Industrial, Outdoor Rated - Gear Wurx
I power these directly with 12v on my mower which reduces the complexity. I have a 70" commercial mower and the hydrostat takes a lot more torque to move than some of the smaller mowers.
I tried some different servos before this as well as some linear actuators. When I talked to the guys at Gearwurx they said they had originally developed these for use actuating a hydrostat.
Thanks for your reply @yuri
I found the problem.
To explain, I have a small grass robot mower with the electronics replaced. Of note is the difference between a big machine and a small machine in relation to the surface you are driving on.
I initially started the tuning process on my driveway (tarmac) before moving to grass to try following waypoints. In my eagerness to make progress, I made the mistake of keeping the tuned Cruise Speed value (around 4.8) from the tarmac driveway instead of re-tuning it on grass (found out had a value closer to 4).The mistuned throttle was causing a severe wobble after every pivot turn, which I could not get rid of no matter what I tried…and I tried a lot! …including trying the beta version, which forced me to go back re-tuning as I got ahrs issues that didnt make sense. In all of this while I did re-tune the Turn Rate Controller (hard) many times I wrongly assumed I had a good value for the Cruise/Throttle Speed (easy).
Hello Sirs,
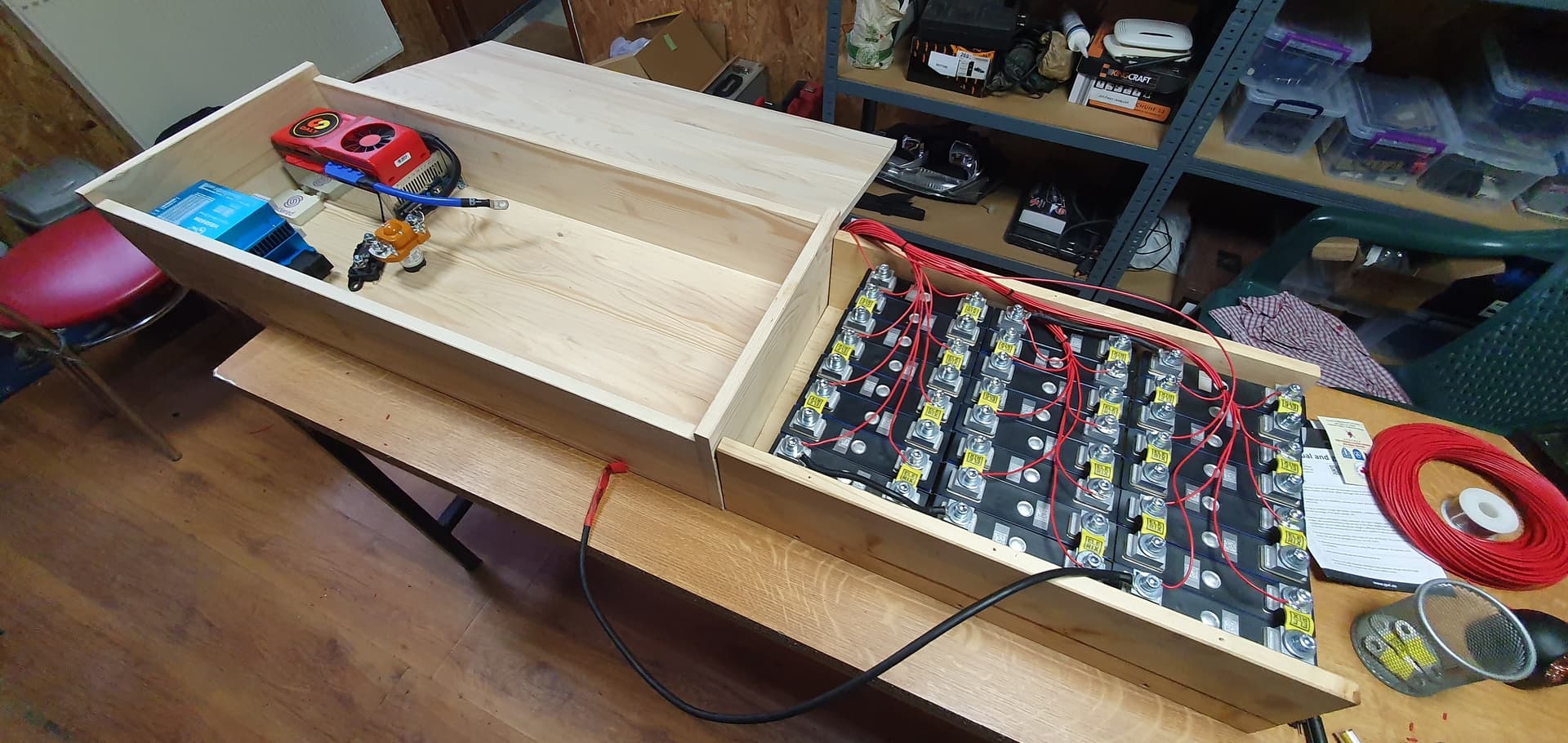
Just to share my current phase of my electric mower build. It will be based on zero turn mower system due to 2 independent electric motors on wheels. Everything is custom build except the mower blades. After it is completed I will use RC controller just to move it around, and after that I want to use Ardupilot to make it move without me.
Some details about hardware:
Mower motor - 5-8kW BLDC [
HPM-5000B from miromax
12Nm stepper motors (aliexspress) with controllers and worm gear 5:1
24S Lifepo4 3,8kWh ELERIX - with daly bms 200A
RC controller Radiolink AT9S Pro
Arduino for converting PWM to pulse for stepper motors
For my understanding for autonomous drive I need some things extra:
Flight controller (Pixhawk or similar)
Ardusimple + RTK station
Magnetometer cannot be possible because of BLDC motors with big magnets
-What else?
Nice machine you are building
Somethings to think about
Failsafes - when setting things up, always test and ensure your machine stops when it looses connections to your RC gear. Ardupilot makes this easy, but you need to get this working early on, before your mower runs away…
Telemetry - getting real time information back on what is going on with your mower. It doesnt always do what you think it should. Being able to watch its progress on your PC makes the difference.
Ardusimple F9P GPS’s are excellent. We purchased 3. 2 for the Mower and 1 for a ground station to send the corrections. Getting the correction data to the mower needs a bit of learning (for me) but works really well. We’ll probably get yet another one for high accuracy mapping of paddocks before we mow them.
Its a fun project and an excellent community - enjoy and post lots of pics of your progress.
Thank you for your support!
Also this started as conversion project, I converter regular tractor lawn mower to electric but then the transsmision broke. So I decided to make it from scratch.