3 F9P boards total? Assuming I’ll be using the mission planner computer as the base station. Could use some help with terminology in this config - there are 2 gps antennas and boards on the mower, and 1 attached to the Mission Planning laptop in my case. What are the terms for these units?
I will admit the terminology is confusing. I will probably confuse things even more but to me the GPS system up on the roof, is your GPS base station which feeds the correction data to your mower either through Mission Planner or directly to your mower. Mission Planner operating on your monitoring computer is also called a base station by some of the documentation for the overall operation of the rover.
1 Like
On a tripod, roof, or flagpole:
Fixed Base
On the vehicle:
Moving Base
Rover
Yes, 3 total.
1 Like
Per the confusing documents and expanding on Steve and Yuri’s post:
Rover has two GPSs.
- “Moving Baseline Base” for determining rover physical position (labeled GPS)
- “Moving Baseline Rover” for determining rover orientation/yaw (labeled GPS2)
1 Like
And to confuse things further, there are a couple of modules that combine the on-vehicle moving baseline configuration into one module with two antennas. The one by CUAV is quite affordable by comparison to the uBlox based modules, but the jury is still out on long term performance. I have one, and it has performed quite admirably on the bench so far.
There’s another by ArduSimple that uses a Septentrio Mosaic module. It’s awesome in terms of performance, but the cost is astronomical and likely not worth considering, especially given the much lower cost of the CUAV hardware.
1 Like
I think I have it now:
GPS Hardware A: Fixed Base - mounted on tripod/roof/flagpole; GPS receiver that collects GPS measurements at a known location (hopefully surveyed)
GPS Hardware B: Moving Base - Moving Baseline Base for determining rover physical position (labeled GPS)
GPS Hardware C: Moving Baseline Rover - for determining rover orientation/yaw (labeled GPS2)
Let me know if I’m now edumucated a bit. . .cris
1 Like
That’s about what you need for the time being. We can always make it more complicated, but that won’t help!
1 Like
LOL! You got it Cris. And as Yuri mentioned, we’ll make it complicated later…
(I’m also not going to admit publicly how long it took me to get this straight)
Onward!
Seems like hazing. . .hope I make it into the fraternity. . .!
1 Like
And an update of my equipment set:
Where are you Cris? 433MHZ is for EU use. 913mhz is USA.
Those look like knock-off holybro radios. Don’t buy them. Make sure you’re getting the real thing. Either Holybro or mRo. Might cost you a few extra dollars but they’ll work. These clones can be a real crapshoot.
Good catch - will cancel and take a look at the others! Delivery wouldn’t have been till Jan sometime - redirecting now!
Austin Tx - would have the FCC all over me if you hadn’t let me know!
SiK Telemetry Radio V3
500mW 915MHz
2 $125.98
$30 for shipping, should have put this on my controller order!
I just wanted to put a post out there to let people know that MowStock 2024 is going to take place down in Louisiana coming up in March. It is a great place to see mowers built by other builders and to compare notes.
Our thanks go out to @Swebre2023 for hosting this again…
DATE CORRECTION! MOWSTOCK 2024 - March 15-17, Church point, LA)-,Rover/Mower/Drone%20Folks!,best%20practices%20and%20share%20experiences%20with%20putting%20these%20autonomous%20contraptions%20together.,-We%20will%20have
1 Like
Hello,
I am looking for advice/to see what camera setups people are using on their large outdoor rovers…if any. What equipment is a good idea and what just doesnt work very well.
The intended use of the rover is for mowing fields. On the rover I intend to use a pi for accessing the pixhawk. A camera for monitoring. I intend to put a router on the rover with a low latency 5ghz backhaul to a mast (to insure line of sight). The idea is to have mission planner running on a pc, and a video feed open on a browser window.
So far I connected a usb webcam to a raspberry pi 4 (bullseye) and had it streaming to my browser using an mjpg streamer. I was very happy with myself until I added Mavlink to the pi and then the camera would not stream anymore, giving a message “Init v4L2 failed”. This might be a memory issue … and I could hack a solution with a bit of research, but I am wondering if I will just have more issues hence my reaching out via this post.
For anyone stuck getting mjpg streaming using a pi and a USB webcam. Below worked for a few days until I added more software to the pi.
Inspiration from Camera installation - Drone Programming - Drone Dojo
Inspiration from 軟硬體的天空: Stream Video - Raspberry Pi + USB Webcam
To make a USB webcam work on a Raspberry Pi V4 using 64bit Raspian on date 21 Jan 24 running Bullseye. I did enable the camera on sudo raspi-config but not sure if it is needed for a USB camera as opposed to using the dedicated Pi connector.
-
sudo apt-get update
-
sudo apt-get install libjpeg8-dev
-
sudo apt-get install cmake libjpeg62-turbo-dev:armhf (this works on the 64bit Pi. Libjpeg9-dev worked on the 32 bit Pi )
-
sudo apt-get install imagemagick
-
sudo apt-get install libv4l-dev
-
sudo apt-get install libjpeg-dev
-
sudo apt-get install cmake
-
wget https://github.com/jacksonliam/mjpg-streamer/archive/master.zip
-
unzip master.zip
-
cd mjpg-streamer-master
-
cd mjpg-streamer-experimental
-
make clean all
-
sudo make install
-
ls -al /dev/ |grep video – check if your webcam is supported on Raspberry Pi
-
v4l2-ctl --list-devices – List devices for v4l2 interface
To view the video feed paste the following into a web browser on the same LAN
./mjpg_streamer -i “/usr/local/lib/mjpg-streamer/input_uvc.so -y -d /dev/video0 -n -f 6 -r 640x480” -o “/usr/local/lib/mjpg-streamer/output_http.so -p 8084 -w /usr/local/share/mjpg-streamer/www”
1 Like
I havent yet put a camera on our mower, but will at some stage.
No companion computer and no plans for one.
My thinking at this stage is to grab an old android phone and run free and excellent
IP web cam software on it.
Where we mow is 100% wifi coverage, so im expecting no challenges.
It can select between front and back camera’s and stream rtsp at high resolutions and low latencies. Have a play with an old android phone, its good fun.
Hardest part is keeping the phone dry and powered.
Thanks for your reply Paul. I got sidetracked setting up a cube orange to replace my cube black.
Thats a cool idea. Having an android on board might be useful in other ways. You can anydesk/teamviewer into it to manage other peripherals. For instance, I am using a JK bms for a lithium battery that powers the drone, and the jk bms is managed using an android app over bluetooth. It allows me to turn on/off the discharge (so power cycle the drone), on/off the charger and on/off the cell balancing which is cool.
Hi Steve J.
O hope you’re doing well!
I was away for a while due to the demand for work here in Brazil, but during this time I was buying the components that I understood as necessary to be able to automate my lawn mower. This model of the lawn mower, is operated by treadmills by electric motors, my idea is to put the control output of the Pixhawk to command the engine drivers that are original of the tractor. Here are some photos to get to know my lawn mower.
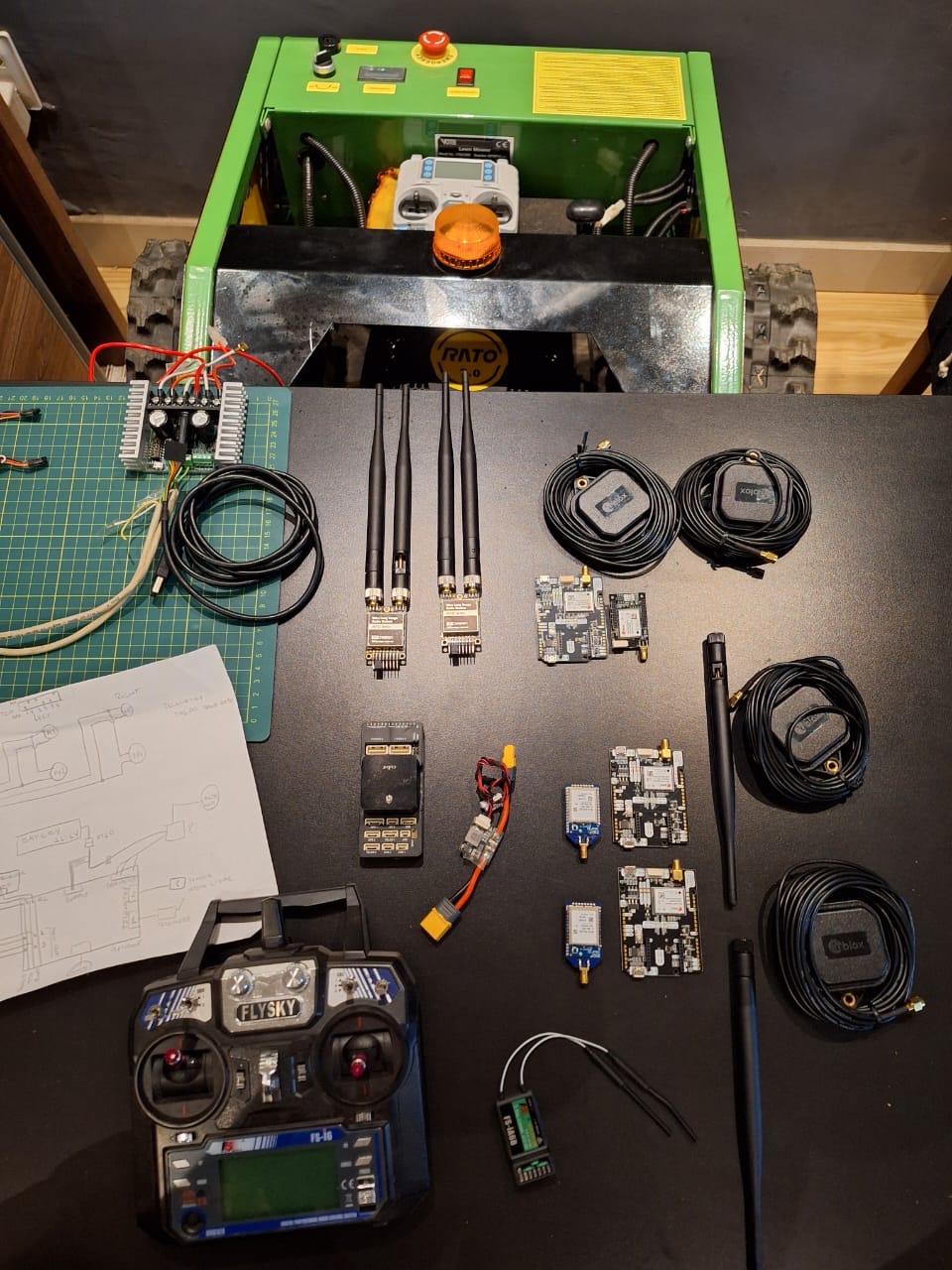
https://drive.google.com/drive/folders/1nfig4WIUy0ZyqfveTCpK921sl1Euk-Ll