Hello
Your project is amazing! I’m Erik from Brazil, and I’m still starting my studies on the lawn mower, and honestly speaking, I have no knowledge about the pixhawk, I’m looking for projects on Youtube and I saw that many use this device for control.
I would like to know if you have a diagram of the electrical connections and the components needed to assemble an autonomous lawnmower. So to have a better idea, to acquire these components and start my tests. Thanks for the posts
Welcome to the challenge.
Like it or not, start reading the https://ardupilot.org/rover/docs/gettit.html is the best approach. I can tell from experience, that I thought, well, get the equipment, plug it together spend a few hours putting some values in others have already figured out and the mower will mow your lawn. — Believe me, this is not how you will succeed.
The documentation will tell you all about the equipment, what you need, why you need it, how to put it together and how to tune it all. There are so many things that need to be understood; and there is no way around it, no short-cut, unless you have it built by someone else.
You will need to understand safety, fail-safe, some mechanics, how GPS works, electrical wiring, remote controllers, receivers, flight controllers, memory, SD cards, firmware, MissionPlanner, technical understanding, some physics and maths, it is not as easy as most have initially thought (including myself).
Check some of the mower builds and videos from the builders and what they are talking about. If you do not understand it, this is where you need to learn.
In any case: all the very best on your journey. ![]()
BTW: the documentation will have wiring diagrams; but every mower hardware is different (one way or the other).
1 Like
Hey, Eric welcome to the Ardupilot website. There is much information to be found here in automating about anything that will move. I have had particular interest in the automated zero turn mowers and it has been a huge learning experience and a lot fun. As a bonus I have made many friends from all over the world all interested in automating mowers.
I agree with Max, the Introduction to Rover — Rover documentation is a great place to start and I would also recommend reading the earlier posts on this thread discussing the flight controllers (we use processors generally meant for aircraft) people are using in the mowers. Best gear for starting ArduPilot Mower - #4 by SJohnson
1 Like
I agree with you 100%, thanks a lot for the link. I really know I need to learn more about. In any case, the team here can help me with questions.
Thanks again for your attention!
Steve Johnson.
Thank you for your attention, and I hope to be part of this team! Thanks for the links
Read all 100+ posts in this topic, also.
Feel free to ask questions. There are a lot of great people on the blog that are willing to help.
I was quiet for a few days due to all sorts of frustrations around the build. ![]()
I am a big picture guy, which, like anything in life, has advantages and disadvantages.
So I wired it all up to arrive at a minimum viable product. I have the GPS and flight controller sorted, plus two servos for the hydro stats dangling off, and the thing can be remote controlled. However, despite having min, max, and trim values set, the mower does not run straight (slight tendency to the right).
Reading the documentation and speaks about “drive” the mower, but does not tell at what (engine) throttle setting.
I had weird turning speeds (under RC) due to using idle speeds, rather than 50 or 80 or whatever percent.
I like Yuri’s wheel spin measuring set-up. I have some hall sensors, but can’t find them, same for the magnets. (=frustrating). However, I have ABS sensors (from a Chevy ![]() ) on their way to make use of the ABS rings I already have, and which I could easily fit on the drive axles… I reckon their pulses could be later be fed into the flight controller, but at least to be used for adjusting the wheel spin.
) on their way to make use of the ABS rings I already have, and which I could easily fit on the drive axles… I reckon their pulses could be later be fed into the flight controller, but at least to be used for adjusting the wheel spin.
The point, I probably should not tune turns, unless I have the “straight” sorted.
Also, with the ‘safety’ conversation… I’d like to avoid having to redo the wiring, to include other contacts, e.g., to kill the engine. Hence, I would like to get some feedback, what others have implemented.
I pulled the SD card from the flight controller, as multiple attempts to pull the files failed. I think it was Steve Johnson, who suggested to put a bit of tape on the card (like a little handle) to pull it out. However, I discovered the at least my Pixhawk 4 has a ball pen mechanism; e,g., push the card in a bit and it comes out. ![]()
I did a test a few days ago, saving the parameter file, then loading the defaults, the controller rebooted. Then loading the previously saved parameter file. All under the assumption that the the system would come back as it was. However, now the battery info is missing, it only shows one GPS, meaning I can’t trust the settings, and have to check them all, based on the notes I took (I am glad I did).
So all in all, a reason for having taken a few days off. ![]()
There’s no mention of engine throttle because most users aren’t using hydrostatic drives.
Tune it at the engine throttle setting you will use for mowing.
1 Like
There is a component layout and wiring diagram attached to post 89 on this blog topic.
1 Like
This is exactly what I’m thinking for my next auto mower. I have been using Ego tools and the experience is positive. The price tag is a bit high though, hard to justify for my 1/2 acre yard.
Are you planning on automating and Ego zero turn mower? Is it gas or electric?
Hi Chris,
Thanks for sharing this. It is a big help.
Were you able to order the blade motors from Chongqing Yurui directly or from a reseller?
I say this because they seem to have a 100 minimum order.
Thanks again.
I ordered direct from them on Alibaba. Quantity 10.
I feel converting an electric mower is easier than a gas one.
Agree… ![]() was my preference to build an electric, but due to price increases in particular freight I decided to get a zero turn. At least I could mow until the thing was automated.
was my preference to build an electric, but due to price increases in particular freight I decided to get a zero turn. At least I could mow until the thing was automated.
@Kevin_OBrien seems to have some insight in controlling the 2 Ego electric drive motors with Ardupilot. Yuri's 4.1.0-beta Update (GPS yaw - now 4.3-beta1) - #205 by Kevin_OBrien
Dear Steve Johnson,
I hope everything is alright!
So, thank you for the diagram provided and I will proceed to acquire my components.
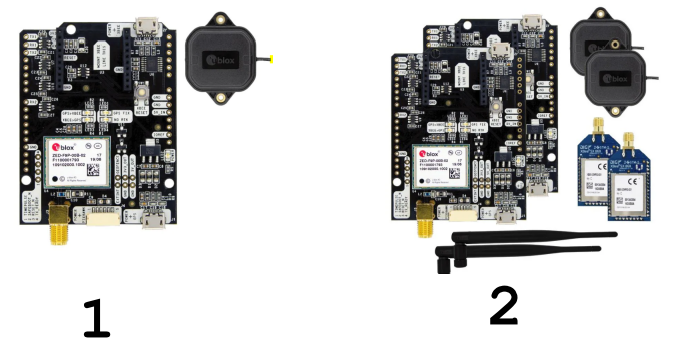
I had a doubt about the ZED-F9P, these are the GPS data collections, right? I’m watching some orientation videos to learn more. RTK uses the Base Station to improve the Rover’s GPS accuracy.
My question is, from the diagram there is a Moving Base, does this work as a base station or do I still need to have a ZED-F9P to do this function?
What antennas do you suggest I use?
Is there any place that recommends purchasing Pixhawk and Ublox?
Grateful,
Erik R.
You still need a fixed base station F9P board (or another way to get GPS correction data) in addition to the 2 F9P boards on the mower.
Here is a link to and earlier post by @Yuri_Rage
2 Likes
What type of mower are you going to install your equipment on? The servos needed can vary depending on the mower. Some hydrostatic valves are harder to turn than others.