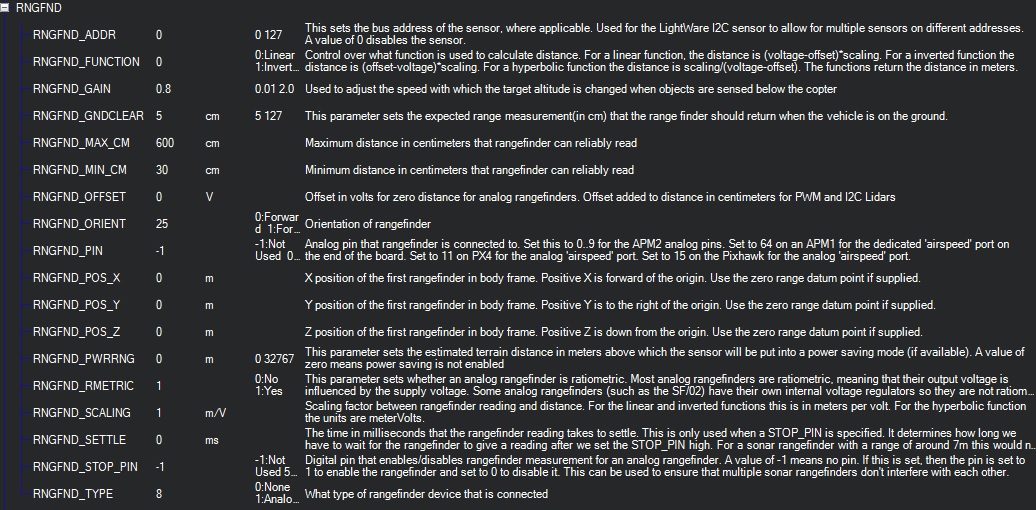
Hi Randy, I’m not sure that the FC reads the Range Finder distance values between RNGFND_MIN_CM 30 and RNGFND_MAX_CM because just before I land (I stop the approach and hold at same altitude, around 150CM) the distance displayed in my Alt Telemetry value is around 3 meters. Once again, my parameters, if something is wrong, please tell me! Still using Arducopter 3.55 on Pixhawk.
Chris,
That doesn’t sound good but I don’t have an explanation for that. I would expect that that would be an issue with the sensor itself rather than ArduPilot but I haven’t got mine working yet…
Hi @Siya,
I’ve contacted your support by the email you provided, still no news, can you provide me help about this? Thanks.
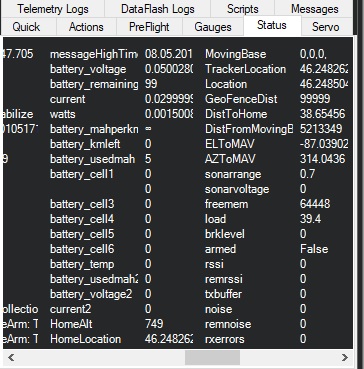
Under 60, I have the same issue than ppoirier, this is not accurate, my sonarrange reports in meter (0.7 written in sonarrange value). It is very accurate above 0.6 meters, but not at all under.
I’ve seen now there are some new points written in the Wiki, but not everything is there. So, could you please tell me if it’s normal to read values in meters in the Flight Data screen, because when we configure it in RNGFND_MAX_CM and MIN it’s in CM. So maybe there in a conversion parameter that I am missing?
And the RNGFND_MIN_CM for me is a non sense, because in the state I cannot be accurate under 60cm. Same for RNGFND_GNDCLEAR
So, where can I check firmware? You’ve already got my email. Thanks.
Answer to myself, hope wiki page can be updated.
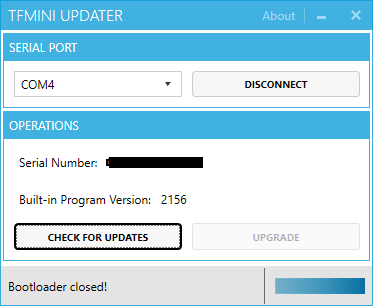
- Check the firmware version of your BFMINI downloading the tool: http://www.benewake.com/en/down.html
- connect via FTDI your BFMINI lidar
- run the tool and click on Check for update
- disconnect the TFMINI UPDATER
AND the do not forget to run TF GUI program and set PIX mode, ana having always the same problem: Range on the ground is from 0.41 to 0.42…
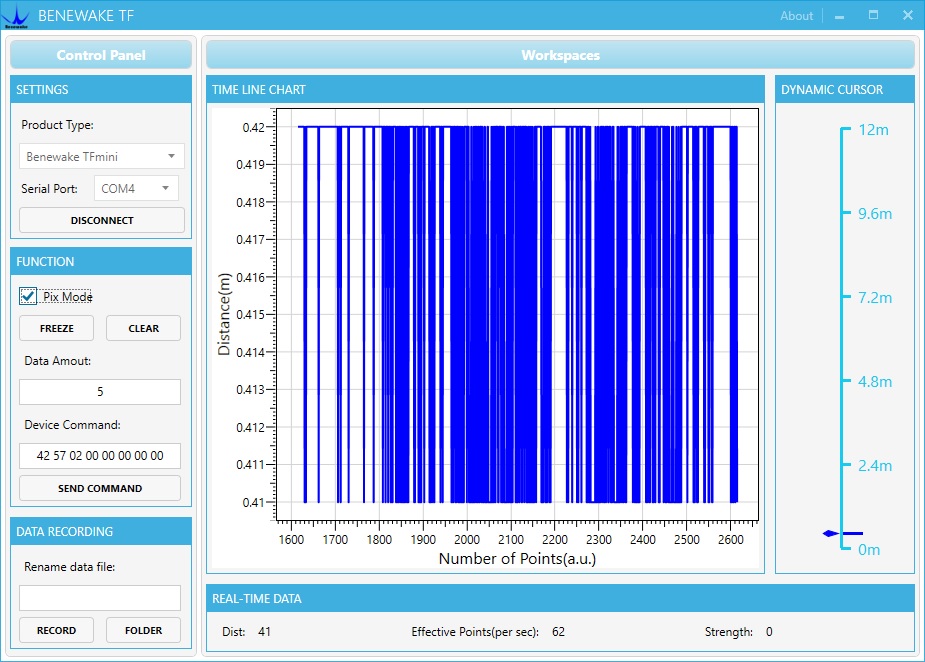
Any help welcome!
Hi,chris661
I am technical support engineer Ms. -Han,could you PLS tell me your email?I will contact you for solve. my email is hanxia@benewake.com
Hi, a question, I’ve disconnected and reconnected the lidar, working ok above 30 40cm, but I have a new prearm message that I didn’t had before: PreArm: RTL_ALT above rangefinder max range
My MAX range is set to 600CM and RTL_ALT is 1500, seems standard, but why this message? Seems o me logic that RTL could be higher than Lidar Max range, no? Running Arducopter 3.5.5.Thanks.
RTL_ALT is 1500 is the default parameter of the pixhawk, if you know more about the pixhawk parameter, you can reset the parameter(0-8000); RNGFND_MAX_CM = 1200 is the highest range of the sensor
thanks @Joey but surprised by your answer. If you read the wiki about your product TFmini, you will see that 700cm is the max reliable recommended altitude:
RNGFND_MAX_CM = 700. This is the distance in centimeters that the rangefinder can reliably read.
So please do not tell people to change this value to 1200. And the RTL ALT to 1500 is ok to me, always used it. This was not the purpose of the question…
hi,chris661
RNGFND_MAX_CM = 1200 is the highest range of TFmini in the room, RNGFND_MAX_CM = 700 is the highest range of TFmini in outdoor
1 Like
Chris,
The message, “PreArm: RTL_ALT above rangefinder max range” means that it is configured to try and use the range finder during RTL I think there is a TERRAIN_FOLLOW parameter has been set to “1” which means, “Use in RTL and Land”. I think it’s safer to leave that as 0. It will still use the lidar in althold, Loiter, PosHold when it is within range of the lidar.
Thanks @rmackay9 that was it. Will help for documentation when I will have all points clear 
One point, in a post you told me:
"Sorry, we don’t currently support blending sonar and map-based terrain following so it’s one or the other"
In another post I’ve found this:
"In case you’re wondering how we decide whether to use google earth data vs lidar, if the vehicle has a lidar attached it will use it, if not, and the mission specifies terrain altitudes, google earth data will be used"
So what I understand, is that if a lidar is attached, in Auto mode (combo Terrain instead of Relative selected), the FC will use the Range Finder (between RNGFND_MIN_CM and RNGFND_MAX_CM) when TERRAIN_ENABLE is set to 1. otherwise Goggle terrain data will be use, right? In order this to work, this is mandatory to upload the Terrain Data (only possible when GPS lock is ok). right?
If Google terrain data is NOT uploaded, will Alt work only with Range Finder or nothing will work?
Thanks. Chris
We wrote some new drivers for the tfmini and tf02 recently. These will go out with Copter-3.6-rc2 in the next week or so.
If anyone wants to bench test them then a Pixhawk/Cube binary for Rover-3.4-dev and Copter-3.6-dev binary can be found here in this zip file. I definitely do not recommend flying these binaries because they haven’t gone through much testing.
I’ve updated the wiki pages for the tfmini and tf02 to match what’s in these binaries.
No pressure but all feedback is welcome!
1 Like
Cool,
I dont see the new drivers here ?
https://github.com/ArduPilot/ardupilot/tree/master/libraries/AP_RangeFinder
Hi @ppoirier,
It’s still in the PR stage so it hasn’t made it into master yet. Looks like Francisco has found a couple of issues so I’ll be resolving those now. I’ll produce another .zip file as well (unless it gets pushed to master soon).
Moved to another thread: Using LIDAR for auto landing, which one?
Hi everyone. I have a question regarding the use of two lidar tfmini in a vehicle to avoid obstacles. I have a pixhawk controller 2. I changed the mode to pix mode. I connected sensors for telem1 and telem2. I configured according to the instructions. It seems that the sensors show the correct distance from the obstacle. The mission planner shows which sensor detects an obstacle. They are set up to avoid an obstacle at a distance of 1.9 m. On the table in steering mode everything seems to work correctly. Sometimes it’s like being stupid and turning into an obstacle instead of avoiding it. But when the vehicle moves in AUTO mode, starts to drive along the planned route and encounters the first and second obstacle, it will avoid them, but next time it starts to spin in circles. What could I do wrong, that it does not work properly?
Hi Chris,
Is the RNGFND_RMETRIC set on 1 needed? I haven’t found anything like this in the wikis or forums. Thanks.
1 Like
hi, I didn’t changed this value, thinks 1 is default.
1 Like
is it possible to use several tfminis in one drone with ardupilot? for example front, left and right directions and back as well. Is it worth of it? It is just idea to make sure drone doesnt hit the obstackles and of course to make everything safer.
1 Like