Sorry if this is the wrong place to ask. I haven’t found a better place.
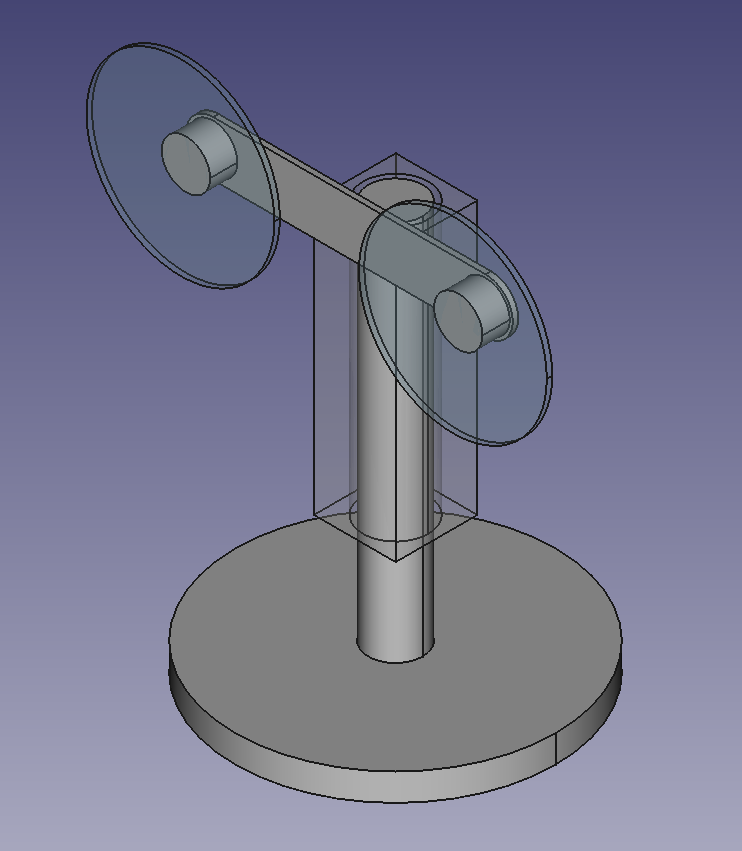
I want to dig into the basics in copter stabilization. For this, I am building a model with two motors, two ESCs a BMI160 and a load cell + HX711 to measure actual thrust. The model is stationary and has two DOFs: angular (rate/position) and thrust and looks like this:
As a controller I would like to start with the most basic: ideally an Arduino UNO.
Why am I asking for help here? Because I can Imagine that the first steps in he Arducopter project are very likely to have followed a similar path, starting with a basic problem like this and slowly adding complexity. However, I haven’t been able to find a point to cling on to start.
Of course, I can do this from scratch, but I would like to be able to follow and hopefully understand the decisions that had been taken at the beginnings.
Any help is welcome,
Regards,
Pere