Hello.
We are testing long flights. The one on the picture was approximately 5.5 hours long.
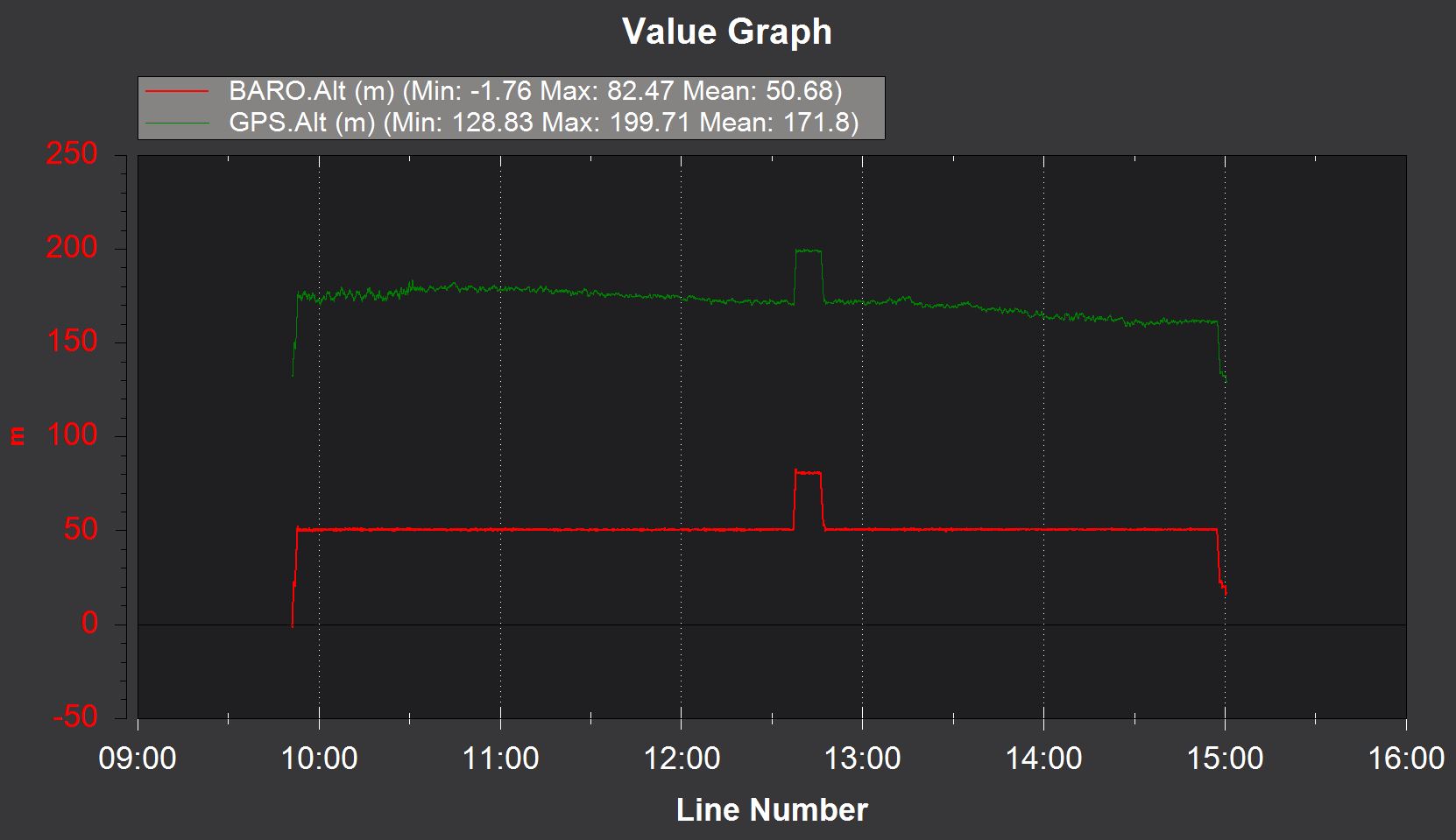
We use alt_source set to Baro. We output this altitude via mavlink to companion computer and controll the drone accordingly. However, during long flights (tether drone) the barometric drift is significant. as you can see on the logs.
I hoped that barometer is from time to time calibrated midair when GPS altitude is present, but it looks like its not.
Is there any way to “turn on” midair barometric altitude calibration?
Or my only option is to use GPS as alt source/ output GPS altitude to companion computer.
Thank you
It is not baro drift, but very likely a change in environment pressure.
You have to measure QNH and from time to time adjust it onboard.
You need a baro on the ground and a mission planner plugin to read it and upload new QNH to the vehicle.
Yes, i meant change in environment pressure.
Thats a shame. I hoped that it can be done with GPS onboard.
I maybe wouldnt have problem with alt_source set to GPS, but the readings look a little bit “bumpy” in short periods.
You need an Ublox F9P GPS, with that you can go for gps only altitude.
FWIW Plane, Rover and Sub all update the barometer calibration while
they are disarmed.
Ok thank you. Ill solve this other way
Hi, with UBLOX F9P can you use FCs without a barometer? Thank you
1 Like