It takes a bit of practice to quickly find the common things you look for in logs, but you get the hang of it in a while. Reading the docs is best, plus going through other peoples discussions usually gives some insights.
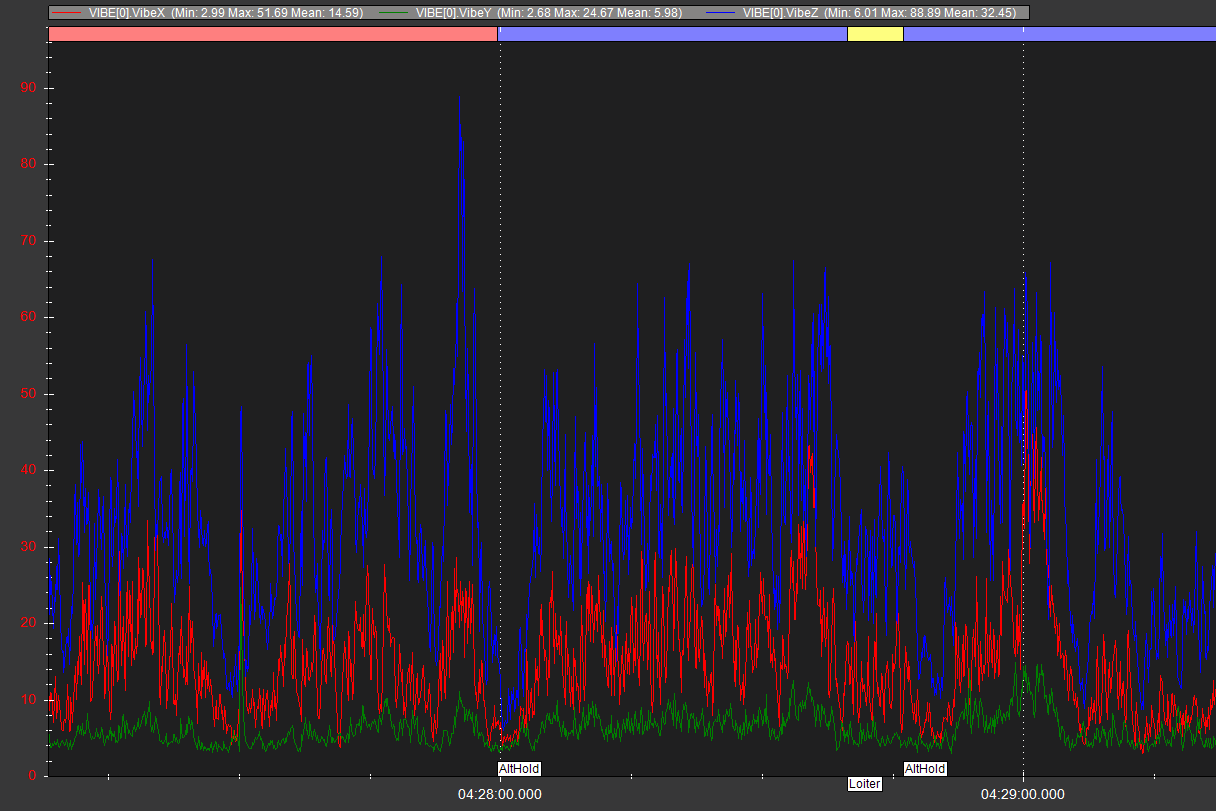
There is bad vibrations there, especially the Z axis which is the one to really worry about.
The vibrations should be below 30 on that graph, and anything above 15 to 20 needs attention. Down around 10 is good but can sometimes be hard to achieve.
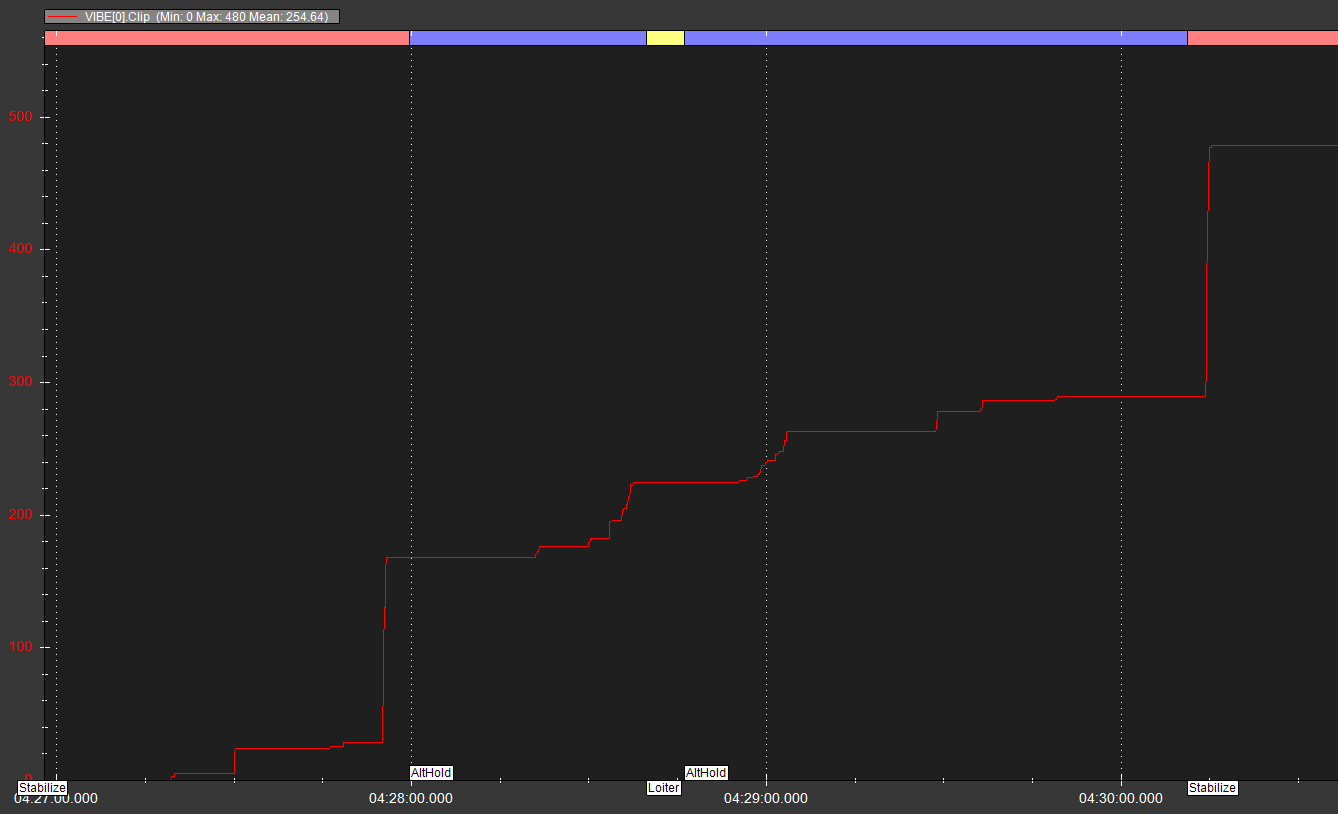
And there’s clipping, which means forces went beyond what could be measured.
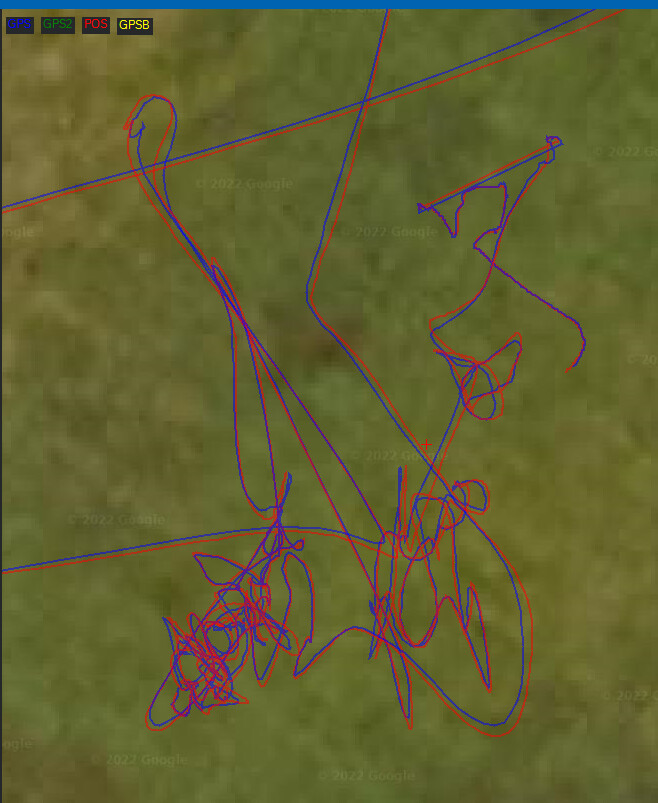
Somewhat surprisingly, the IMU calculated position is only slightly diverged from the GPS position
So first up try and fix the vibrations before any more flights.
X and Y axis are usually prop and motor balance and most easily solved.
Z axis can still be prop and motor balance but also a whole lot more: propwash over the flight controller, frame flexibility and resonance, something touching the flight controller or wires too loose or pulled too tight, bad flight controller mounting… That list goes on unfortunately 
There’s a bunch of info in the docs.
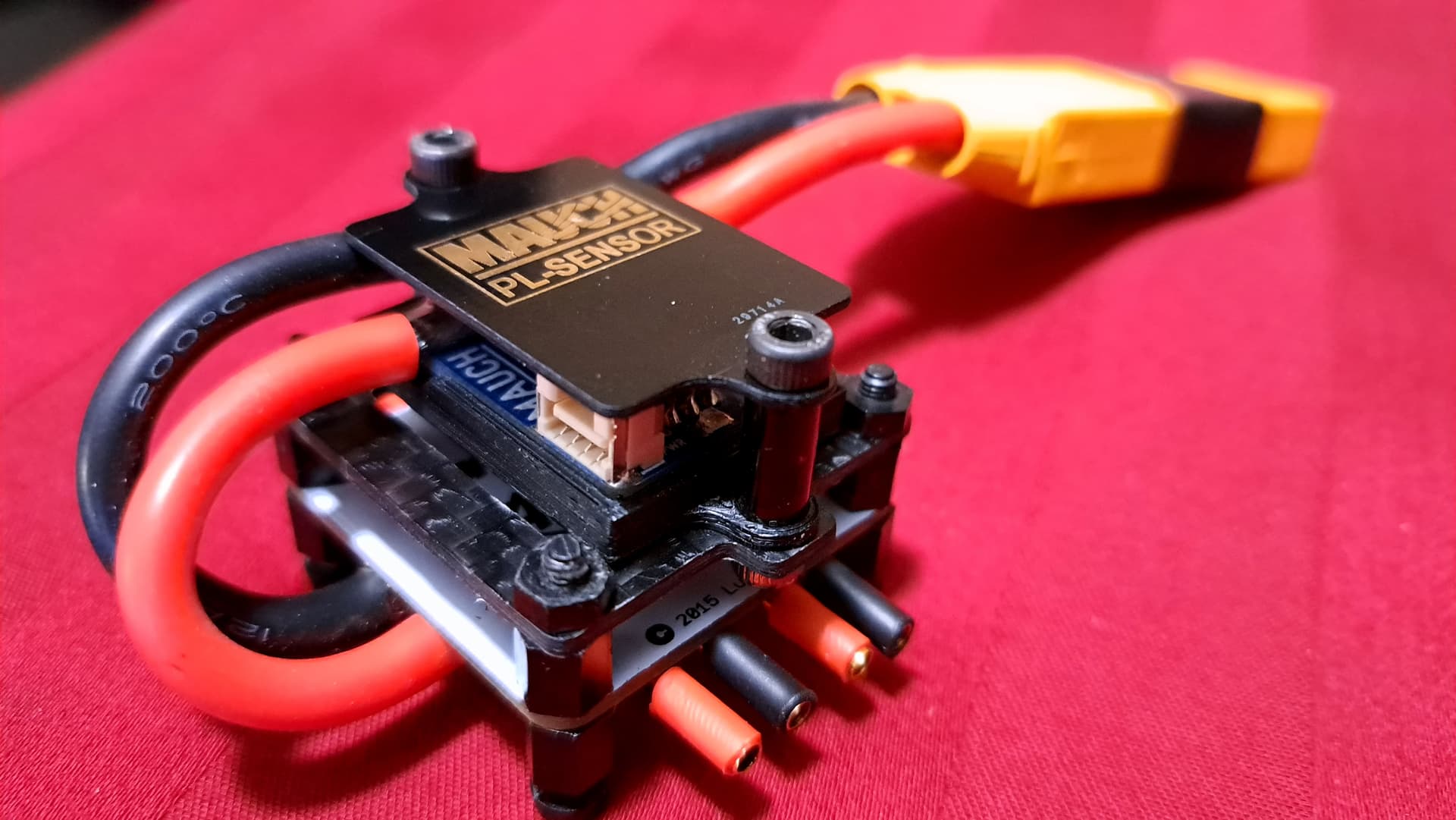
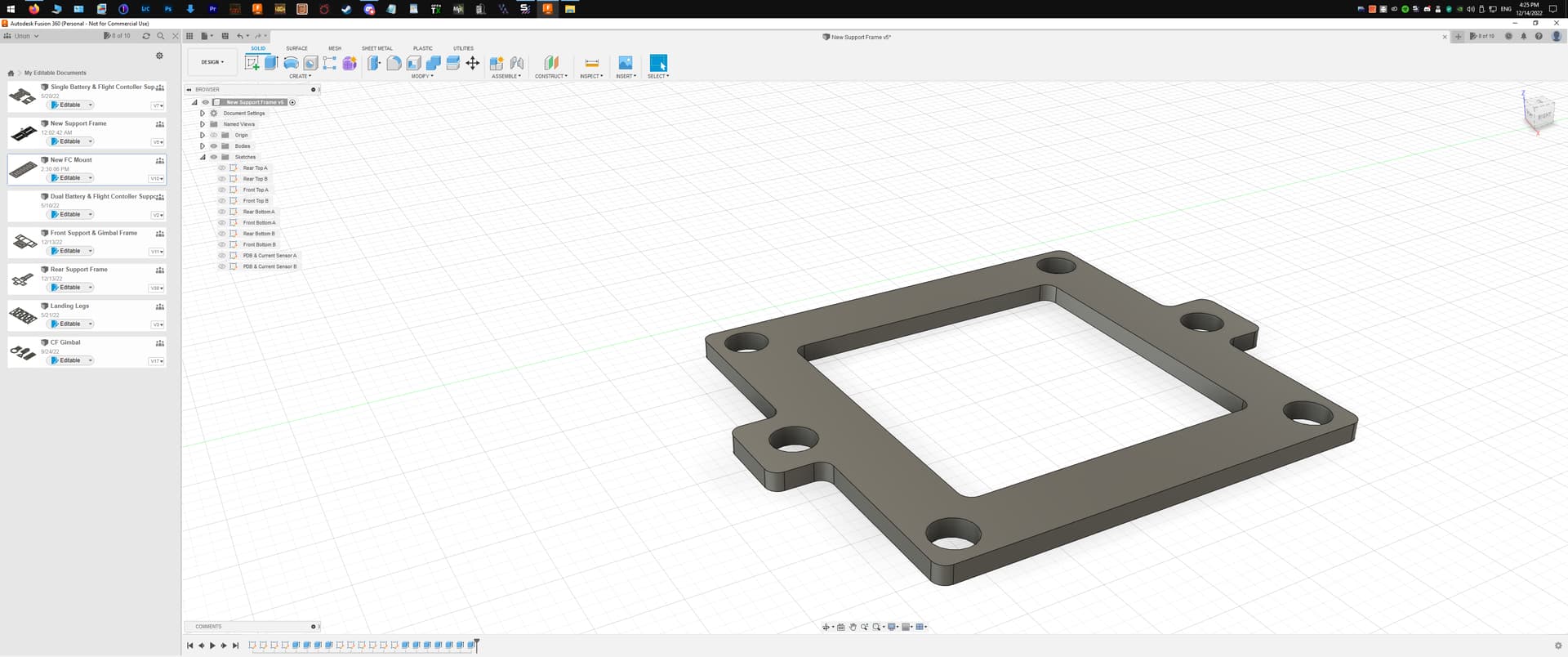
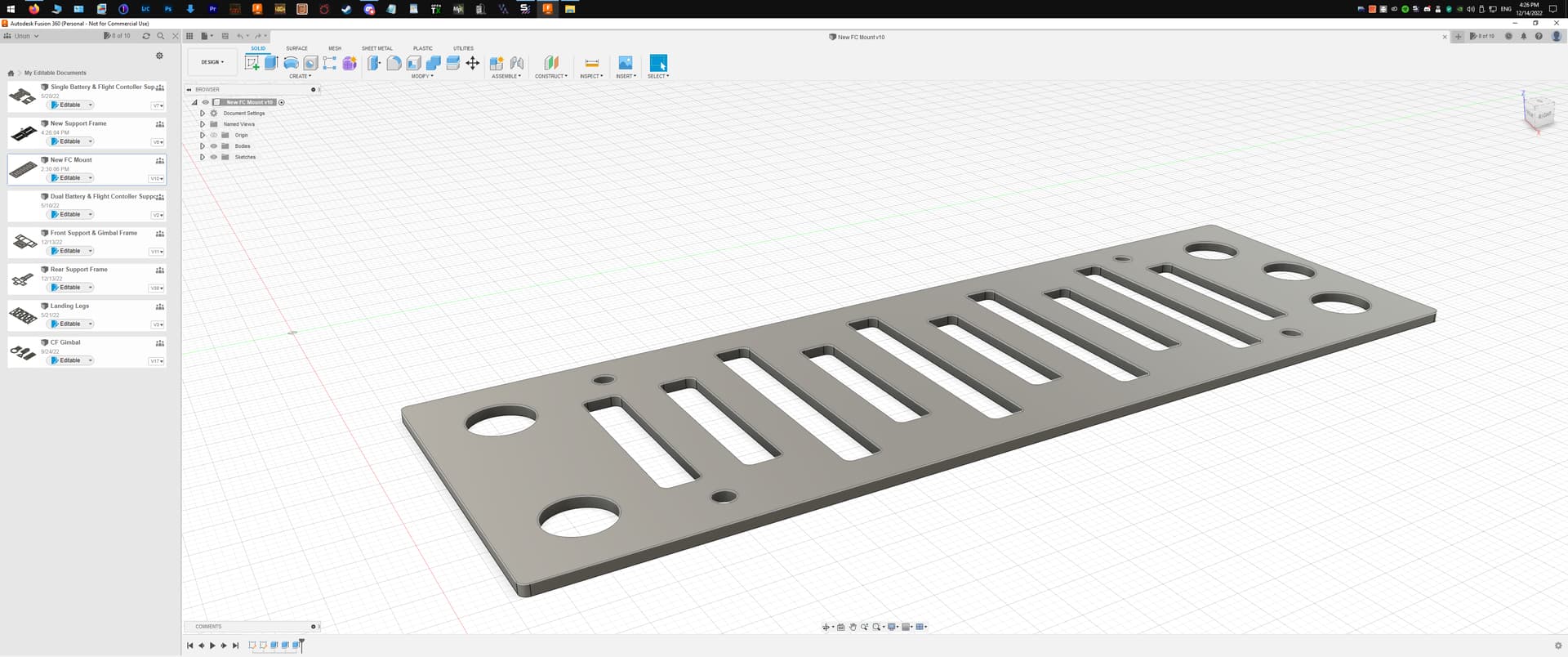
Maybe get a picture of you flight controller in place and we might be able to see an issue.
Also a picture of the entire octo.
In your case X axis vibes are higher than Y axis vibes, indicating the flight controller is not evenly damped. For example the placement or number of stick-on foam blocks is irregular.
It’s not all doom and gloom though, the octo is flying and doing alright so far.
It looks like you’ve only tried tuning yaw a bit, which can usually be left until last. Pitch and Roll are much more critical. Set AUTOTUNE_AXES,3 for when you do get to the stage of running Autotune.
Set these in preparation for the next test flights (after vibrations are improved)
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.15
INS_HNTCH_FREQ,40
INS_HNTCH_BW,20
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
I’ve very carefully calculated the values I have specified here, well guessed a bit maybe, but use them until we know more.
MOT_SPIN_MIN,0.12 ← it was very low, this could be more appropriate
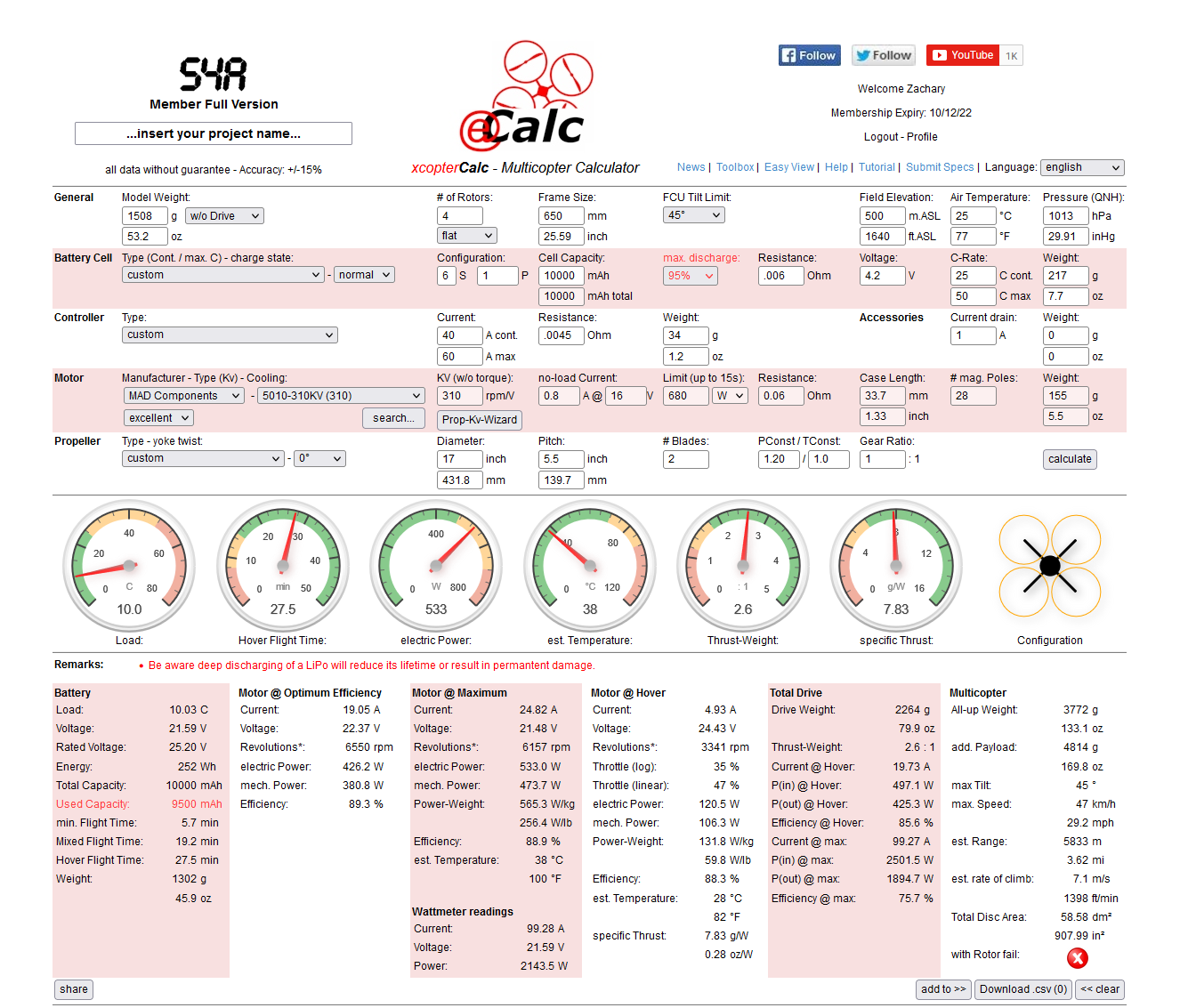
I couldnt quite tell what prop size you’ve got from the parameters, so more information might help.
I imagine this is an octo about a 1.2meters across with about 15 inch props…
What motors and ESCs do you have?
We might be able to refine some of the parameters a bit more.