This is a new copter that just had arducopter, using a Sparky2.
Everything seems to be correctly setup, motors are in the correct order, ESCs calibrated, propellers rotating to the correct direction…
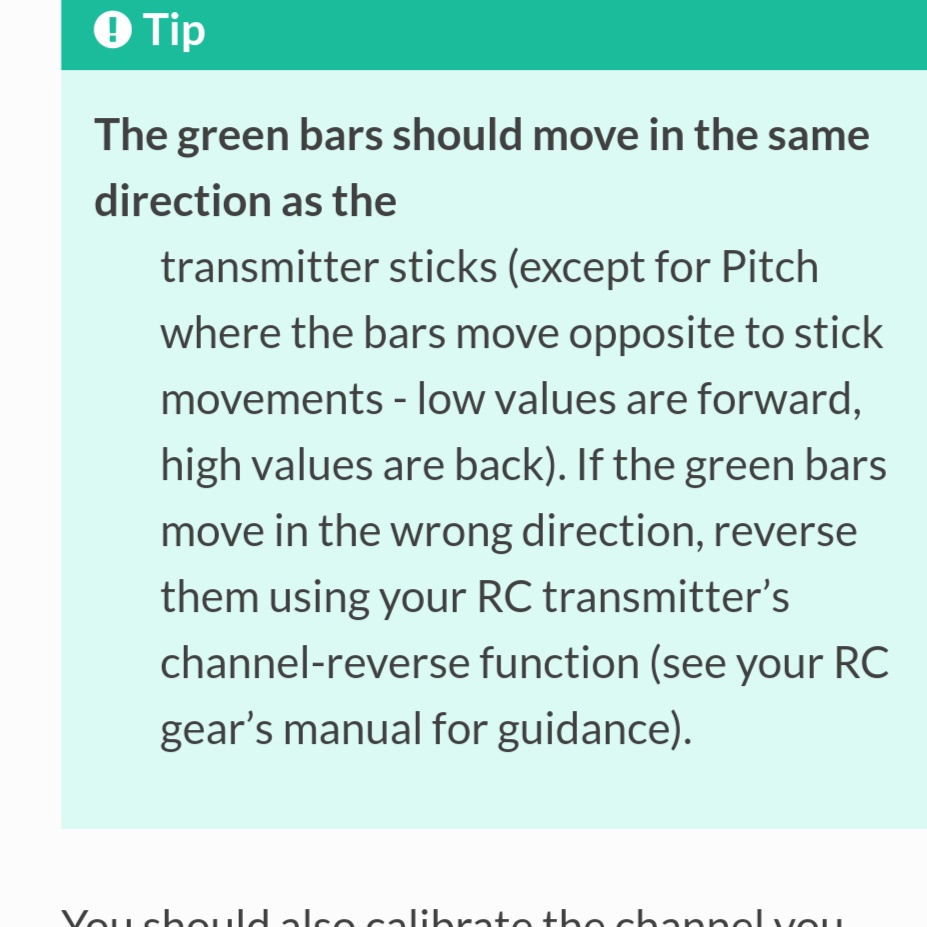
There is one odd thing: in Missing planner pitch seems to be incorrect. If I pitch down, the image shows the drone going up. No orientation setting fixes this and don’t know it if is a bug from Mission Planner, arducopter, or a bad setting.
On takeoff I immediately noticed the behavior to be incorrect as it was flipping. It never raised for more then 30cm and then flipped. Two further test runs had the same behavior.
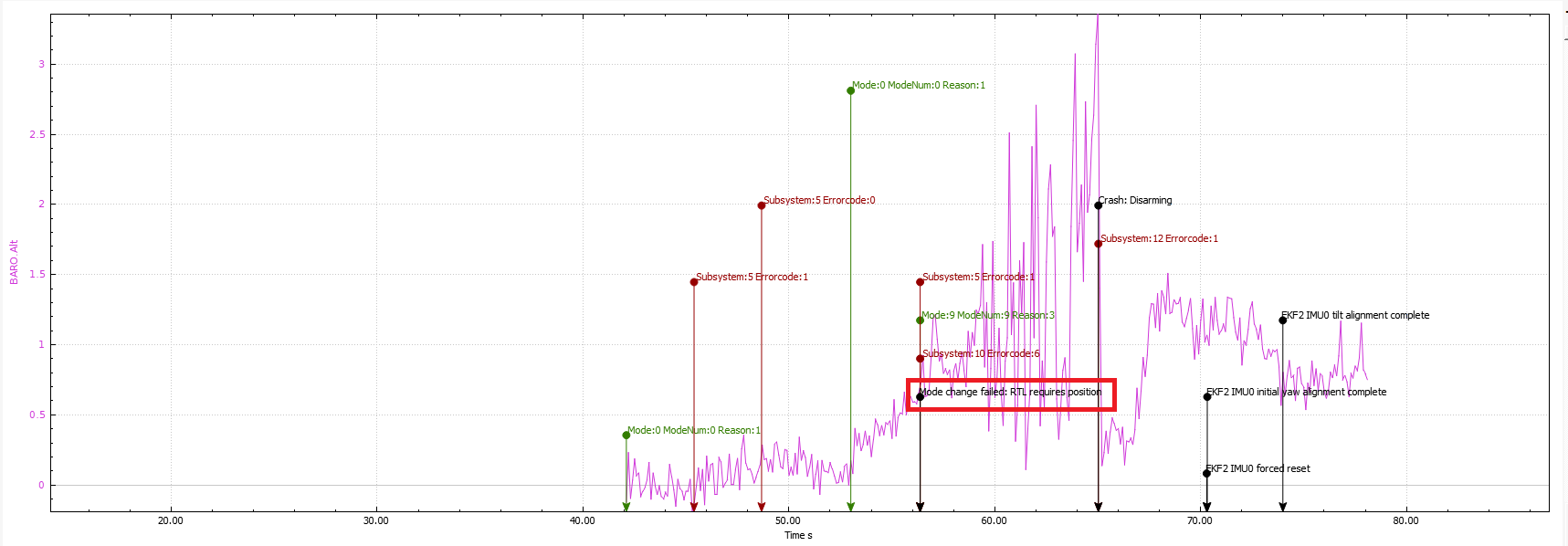
From the logs, I find it odd that the FC increases RC1 and RC2 at the same time, and that RC3 is always low.
After I throttle down (activating the FS), it enters in RTL mode and “goes crazy”.
i’m not sure why your copter is flipping
but from my experience if you try to take off with low throttle (or not enough) in stabilize mode copter will filliping. you can try takeoff in Loiter IF YOU HAVE GPS or AltHold mode if you haven’t GPS for a better control while taking-off.
from the log your copter goes crazy because your fail safe action is RTL and RTL needs GPS, you can chnge it to land to prevent this problem.
also double check these items :
FC direction
motor order
ESC numbers connection in FC
propellers rotating
mag calibration
Accelerometer calibration
level calibration
Thanks for the help.
I went slow because this was the first flight with ardupilot. With other systems it would go ok.
The FC is in the correct direction and I also checked the motor order in mission planner.
I find it weird that the pitch seems inverted in Mission Planner (but I saw other users with the same and flyable copter), and the activation of Motor 1 and 2. Putting power to this combination of motors , with RC3 at the lowest value (AFAIK) will never lead to a successful takeoff.
I will check the althold. I didn’t do it because I was afraid of a potential runaway in the mayden. Another approach will be using ACRO.
That is not the issue. The channels are inverted/or not as required, either in the TX or in ardupilot.
The pitch issue is that, in mission planner the information widget that shows the current vehicle position (pitch, roll, yaw, etc…) depicts that all axis respond according to how the vehicle is tilted, except for pitch which is inverted. If the vehicle pitches down, the widget shows that it moves up.
Because this is a single axis that seems to be inverted, and is not a vehicle rotation, (AFAIK) this is not subject to be corrected by adjusting the FC position.
I don’t know if this is related to the flip over plus the strange (?) activation of motors 1 and 2, and the lack of power to motor 3, but I wanted to provide as much detail as I found relevant.