I am trying to following this simple intro guide so that make my zephyr run.
I am on MacOS M4.
In my terminals, I run:
sim_vehicle.py -v ArduPlane -f gazebo-zephyr --map --console --model JSON --debug --lldb --speedup 1gz sim -ggz sim -s -r -v4 zephyr_runway.sdf
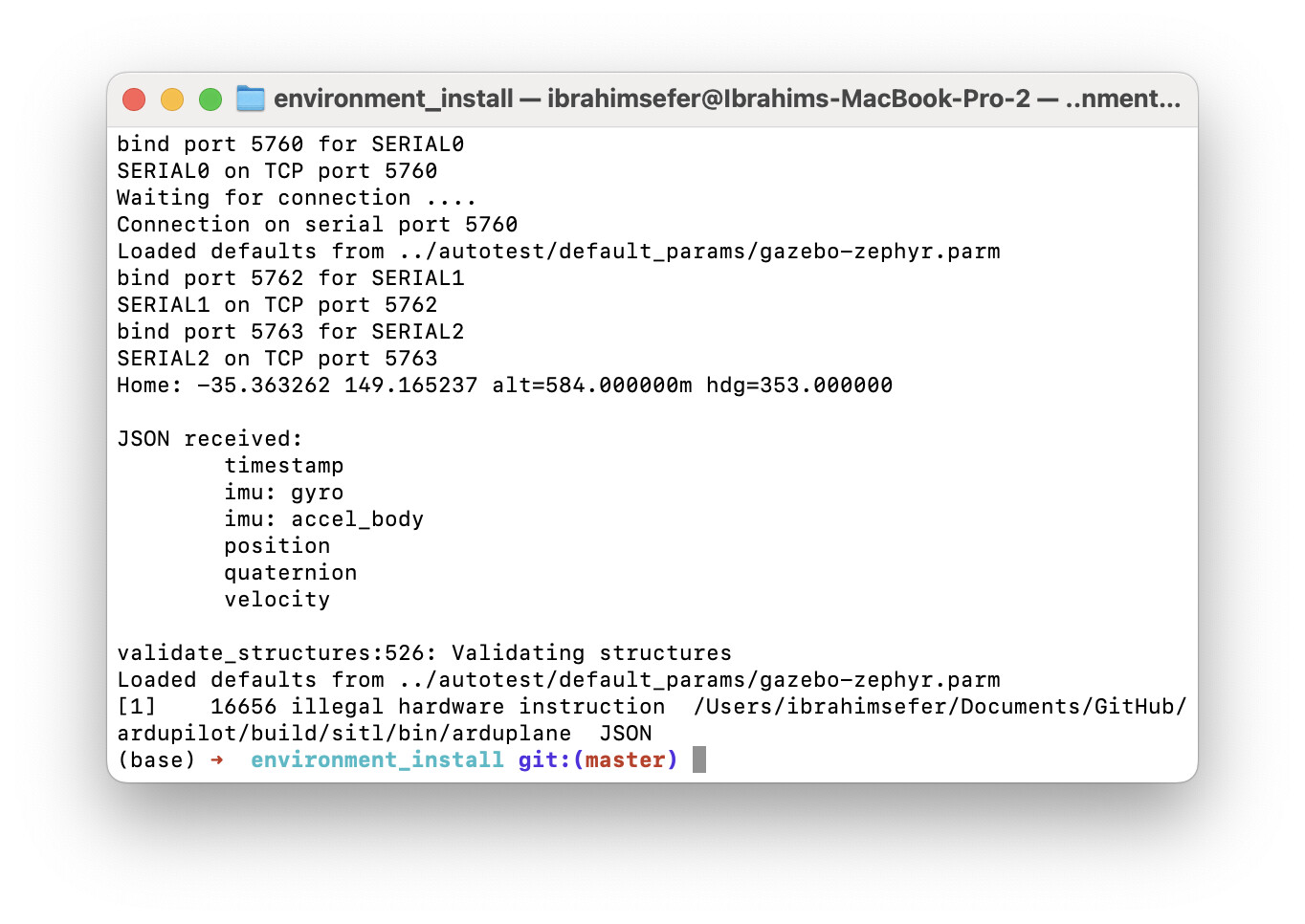
But I am getting this result on one of the windows
Here’s the lldb window:
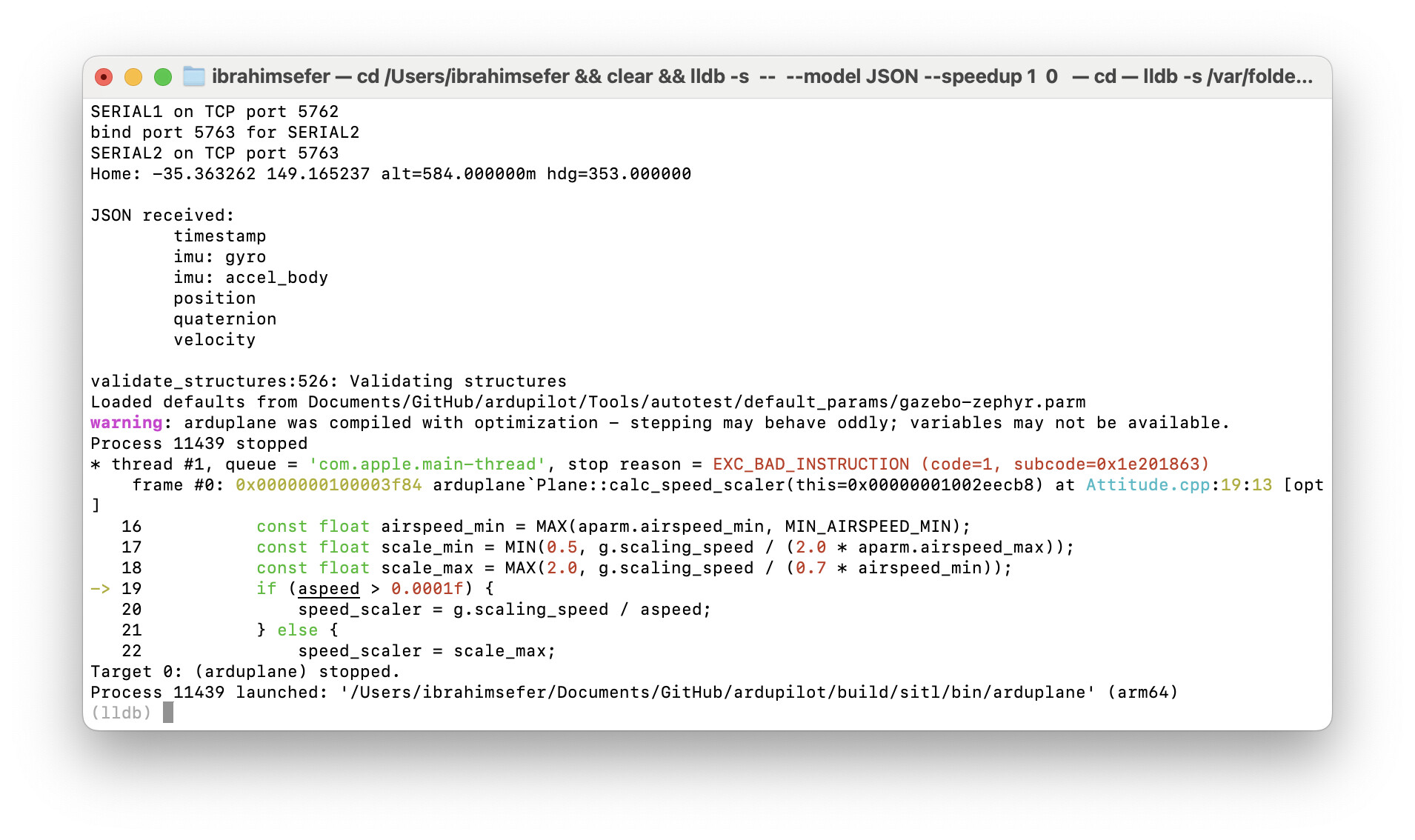
as you can see it gives me this response:
(lldb) target create "/Users/ibrahimsefer/Documents/GitHub/ardupilot/build/sitl/bin/arduplane"
Current executable set to '/Users/ibrahimsefer/Documents/GitHub/ardupilot/build/sitl/bin/arduplane' (arm64).
(lldb) settings set -- target.run-args "--model" "JSON" "--speedup" "1" "--slave" "0" "--defaults" "Documents/GitHub/ardupilot/Tools/autotest/default_params/gazebo-zephyr.parm" "--sim-address=127.0.0.1" "-I0"
(lldb) command source -s 0 '/var/folders/_c/dylw2htx35b_nsyqp43w3nl00000gn/T/tmp30o4w__s'
Executing commands in '/var/folders/_c/dylw2htx35b_nsyqp43w3nl00000gn/T/tmp30o4w__s'.
(lldb) process launch
Setting SIM_SPEEDUP=1.000000
Starting SITL: JSON
JSON control interface set to 127.0.0.1:9002
Starting sketch 'ArduPlane'
Starting SITL input
Using Irlock at port : 9005
bind port 5760 for SERIAL0
SERIAL0 on TCP port 5760
Waiting for connection ....
Connection on serial port 5760
Loaded defaults from Documents/GitHub/ardupilot/Tools/autotest/default_params/gazebo-zephyr.parm
bind port 5762 for SERIAL1
SERIAL1 on TCP port 5762
bind port 5763 for SERIAL2
SERIAL2 on TCP port 5763
Home: -35.363262 149.165237 alt=584.000000m hdg=353.000000
JSON received:
timestamp
imu: gyro
imu: accel_body
position
quaternion
velocity
validate_structures:526: Validating structures
Loaded defaults from Documents/GitHub/ardupilot/Tools/autotest/default_params/gazebo-zephyr.parm
warning: arduplane was compiled with optimization - stepping may behave oddly; variables may not be available.
Process 11439 stopped
* thread #1, queue = 'com.apple.main-thread', stop reason = EXC_BAD_INSTRUCTION (code=1, subcode=0x1e201863)
frame #0: 0x0000000100003f84 arduplane`Plane::calc_speed_scaler(this=0x00000001002eecb8) at Attitude.cpp:19:13 [opt]
16 const float airspeed_min = MAX(aparm.airspeed_min, MIN_AIRSPEED_MIN);
17 const float scale_min = MIN(0.5, g.scaling_speed / (2.0 * aparm.airspeed_max));
18 const float scale_max = MAX(2.0, g.scaling_speed / (0.7 * airspeed_min));
-> 19 if (aspeed > 0.0001f) {
20 speed_scaler = g.scaling_speed / aspeed;
21 } else {
22 speed_scaler = scale_max;
Target 0: (arduplane) stopped.
Process 11439 launched: '/Users/ibrahimsefer/Documents/GitHub/ardupilot/build/sitl/bin/arduplane' (arm64)
(lldb)
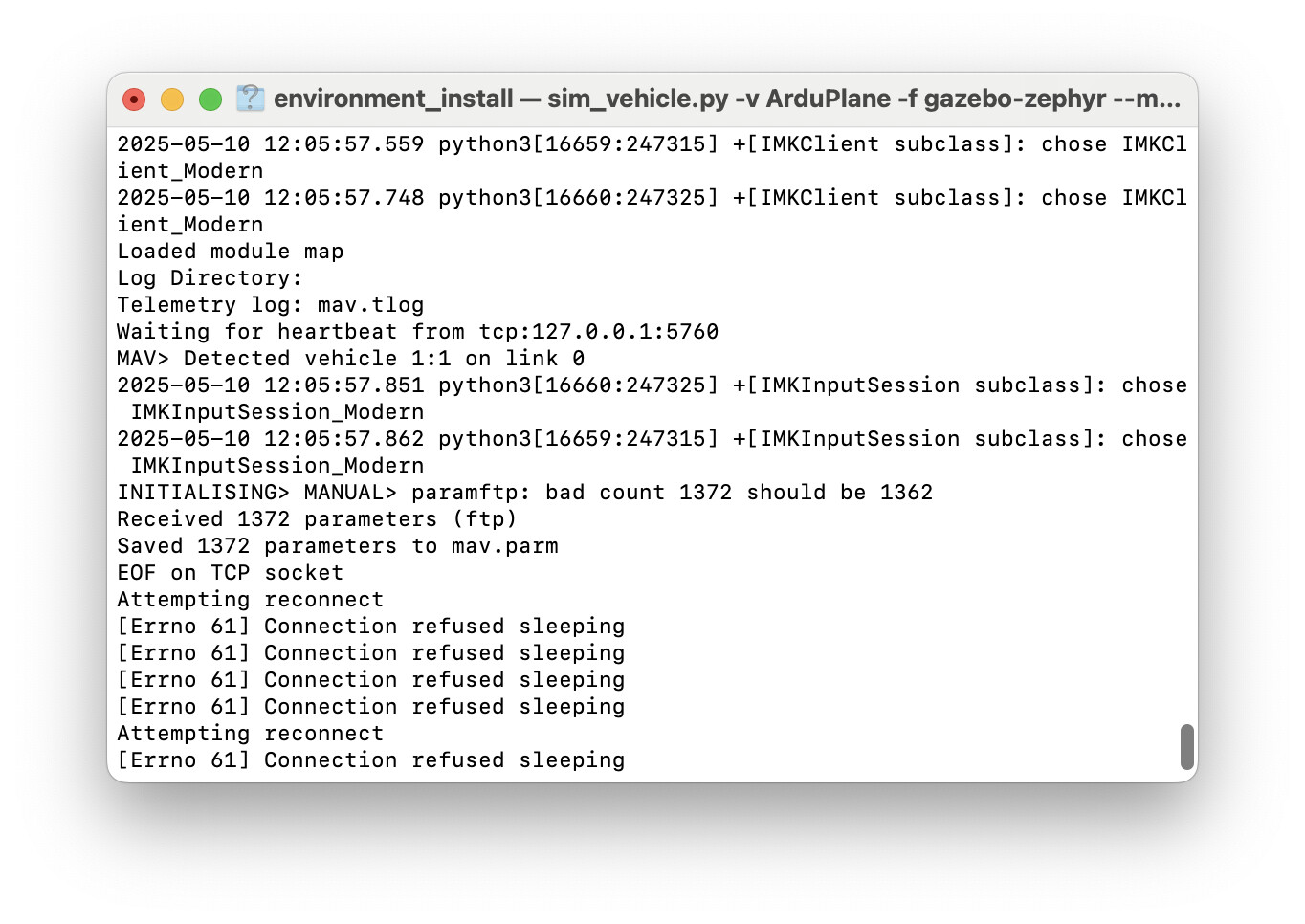
As soon as this error is displayed, the no link gets displayed… It just disconnects…
Hopefully, someone is able to help me!
Here’s the full window display if it’s helpful:

P.S. I will tag you @timtuxworth because you had a very similar issue, so maybe you are encountering this issue right now, or maybe you have even solved it?