Hello everyone, I have a Pixracer-R15 running copter-3.6.9, I have tried several times to play with the sched_loop_rate parameter, increasing its value to 500hz, 600hz and 800hz, getting the same error message “Bad Gyro Health”, I have made several flights with poor attitude results.
Some suggestions in this regard, will be well received.
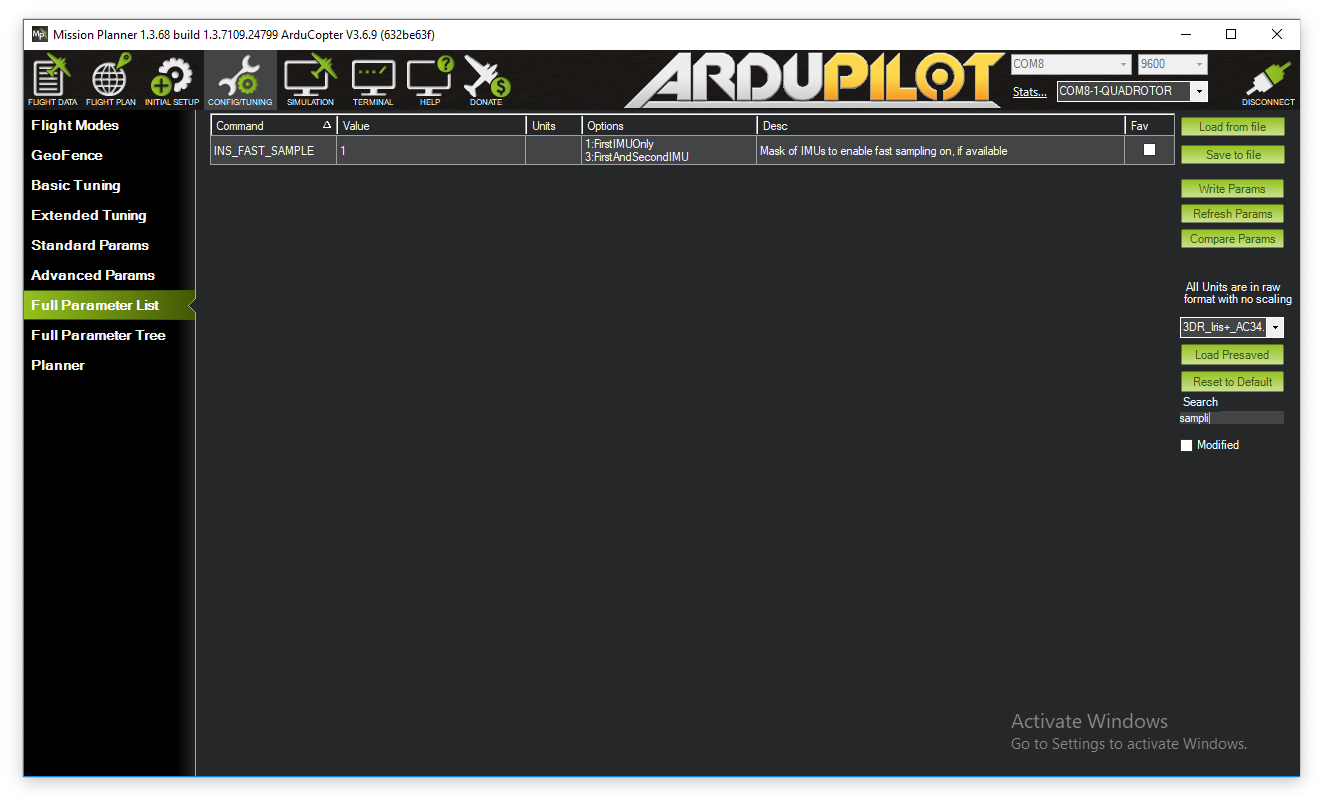
Hey Winston, I am running at 800Hz on a Pixracer R14 with good results. I do get bad gyro health messages, but tend to ignore them. How many IMU’s are you running? Do you have fast sampling switched on?
I am running with fast sampling and only one IMU. I think the ICM20608 is a lot better than the MPU9250 anyway, and with only one IMU you don’t get all of this EKF switching nonsense that seems quite common in small copters. The gyro health message is sent when it was unable to read a sample in a given period - I wonder if there is a bug in this code dependent on the loop rate.
Thanks Andy, I have set INS_ENABLE MASK = 1, and other settings as recommended, Bad Gyro Health messages do not appear. After making two flights and I noticed that the drone feels better, but I think I have to autotune since I activated dshot600 and I was flying with dshot300 y Sched_loop_rate to 400hz.
Hi all, I’m using Pixracer r15 and in my small copter (sub 200g with 5" props) I’ve disabled all IMUs and add an external damped one (only 1 IMU !).
With this system I’ve never had bad gyro health and I’m using for work since 5 months, loop rate at 1200, but I’ve used also 1600, but with this APM atm, cannot establish the usb or wifi connection with ground station
For my experience with small copter, redundant IMU is not a good option, I prefer to focus on a single good quality IMU and on its filtering, and with the next Leonardthall and andyp1per development and also the new guglie IMU filter tool, I guess we’ll have an excellent new base to evolve to next level this small copter league
It is interesting to know all that, today I made several flights after having solved the problem of bad health of the gyro, I must say that the drone feels very stable, smooth and more accurate.
Good catch andyp1er , for semplicity I’ve wrote Pixracer, because we made a custom FC based on the original Pixracer, basically its totally integrated on our custom frame with also our Blheli32 DSHOT1200 1s/2s integrated ESC. The electronic engeneer is my father and with the hardest way he could reload a bootloader as we do for every new units after the SMD assembling stage.
I want to note that at 1600 loop rate the drone is flying better than 1200, I could subscribe this statement


 , for semplicity I’ve wrote Pixracer, because we made a custom FC based on the original Pixracer, basically its totally integrated on our custom frame with also our Blheli32 DSHOT1200 1s/2s integrated ESC. The electronic engeneer is my father and with the hardest way he could reload a bootloader as we do for every new units after the SMD assembling stage.
, for semplicity I’ve wrote Pixracer, because we made a custom FC based on the original Pixracer, basically its totally integrated on our custom frame with also our Blheli32 DSHOT1200 1s/2s integrated ESC. The electronic engeneer is my father and with the hardest way he could reload a bootloader as we do for every new units after the SMD assembling stage.