My file upload is not completing. It stops at various % completion. Made it to 96% one time, 92% another… The file is located here as an alternate: https://www.dropbox.com/s/npd16lxub50tdb1/2018-05-12%2023-25-39.bin?dl=0
Dear Kenny
Glad you had a good day and made progress.
Hopefully I will start testing late next week when my new antennas turn up
Are there any particularly important Mission Planner Params that need to be set for this to work
Regards
Max
I have played with so many parameters, that I’m not sure! I will send you my parameters and try to point out ones I specifically worked with.
I still don’t have a good compass working. I have tried the internal one and I have a module with an M8N GPS and compass. I didn’t really want to connect the GPS right now since I have the C94-M8P and didn’t want to confuse myself with a second compass that was not RTK. But, the power and ground are only in the GPS connector and not the I2C that is where the compass connects. I moved the power and ground to the I2C connector and I don’t think it is working. I just disabled it for now.
I am getting BAD AHRS sometimes even when I have a good GPS signal. I’ve got to dig into that. I wonder if it is that I am losing data from the C94-M8P but I really detected that.
I took video from my pickup truck as I followed the mower across the field (in Auto). That was pretty cool. I had a busy day today with my hay fields and didn’t get to touch the project until just before dark. We have rain forecast for the next several days so I may catch up on making some things more permanent!
I will work on sending you some info on how I have the parameters set and I’ll send links to the videos. I’ll put them on YouTube.
I look forward to hearing how things go for you!
By the way, what kind of antennas do you have coming? I assume you mean GPS antennas. I bought two Garmin GA 38 antennas. That is what you will see in the videos of my mower. Here are some videos I shot today:
1 Like
I also have the Garmin GA 38’s. They were markedly better than the stock antenna. Now that I seem to have the C94 M8P’s setup ok they generally take 20 seconds to start getting the rtcm3 messages and 30 seconds to get a RTK fix. So 50 seconds in all from power up.
When ever it takes longer then a cable is loose or the satellite distribution is not good
I have also ordered 2 Tallysman antennas 3712 (the full product code is 33-3712-00-01-1500). Can not say how they are as they are still in the post.
Max
Your zero turn project looks great.
I am following 2 separate routes.
Like you, one route is the C94 and the pixhawk mounted on a small actobotics rover.
For the second route I am writing my own autopilot code from the ground up. I must be crazy as coding is not my strongest suit. I am doing this to learn c++/ Arduino programming as the Ardupilot Rover code is still a little too complex for me so by writing my own I hopefully will probably be able to later on understand the ArduRover code.
Also the ArduRover code is being developed by others and I have no control over its development. However with my code I can do what I like when I like. The code for my project does not need to be too complex. It will focus on straight lane mowing.
For now this code on a Arduino mega is also on a small actobotics rover, with the C94 gps, a HMC6343 tilt compensated compass,SD card reader, Telemetry Radio, LCD. The main problem I am facing is the the compass throws out some crap from time to time I think mainly due to vibration.
I have bought mower from SuperDroidRobots and I am migrating to this when the model testing is completed.
As I have spent so much time on my code I prefer to hold off on the pixhawk Ardupilot rover route.
regards
Max
I originally planned to write my own code. I didn’t know that Ardupilot existed, really. I am impressed with its abilities, but it isn’t perfect for my eventual application, which is to build a chemical sprayer. I will need to detect when the chemical tank on-board is out of chemical and have the rover return to the filling station. Then, I have high hopes of having it automatically refill itself with chemical and water and go back where it left off and continue. I have built control systems during my career and know I can accomplish this, but it will take a lot of custom code and various sensors. I don’t know that I will try to make all that work with Ardupilot, although, I might, with external processors for some parts of the operation. I’m not sure yet.
Have you seen any software that will generate waypoints to guide the mower around the perimeter of a polygon and then work inward one mower width until the job is finished? Mission planner can generate back and forth paths for surveying which will work for up and back motion, but I would rather “round and round” so to speak.
@WickedShell, I will gladly take an “I told you so”! I was test driving this weekend attempting to determine the range of the C94-M8P eval boards with their stock 915 MHz antennas. When I got near the limit of the range, I got a few “Bad GPS Signal Health” errors. The gpa2.delta did have some spikes above 300 mSec, even one at 400 mSec. The attached screen capture is of that section.
I’m going to experiment with other methods so that I can get the baud rate up to what it needs to be between the GPS and the Pixhawk. Thanks for your guidance.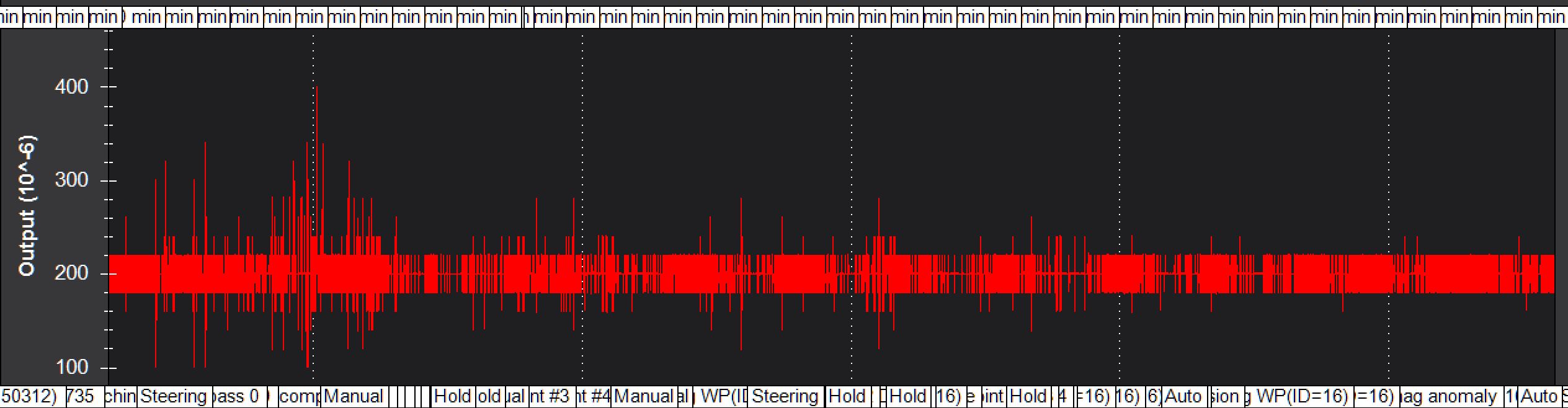
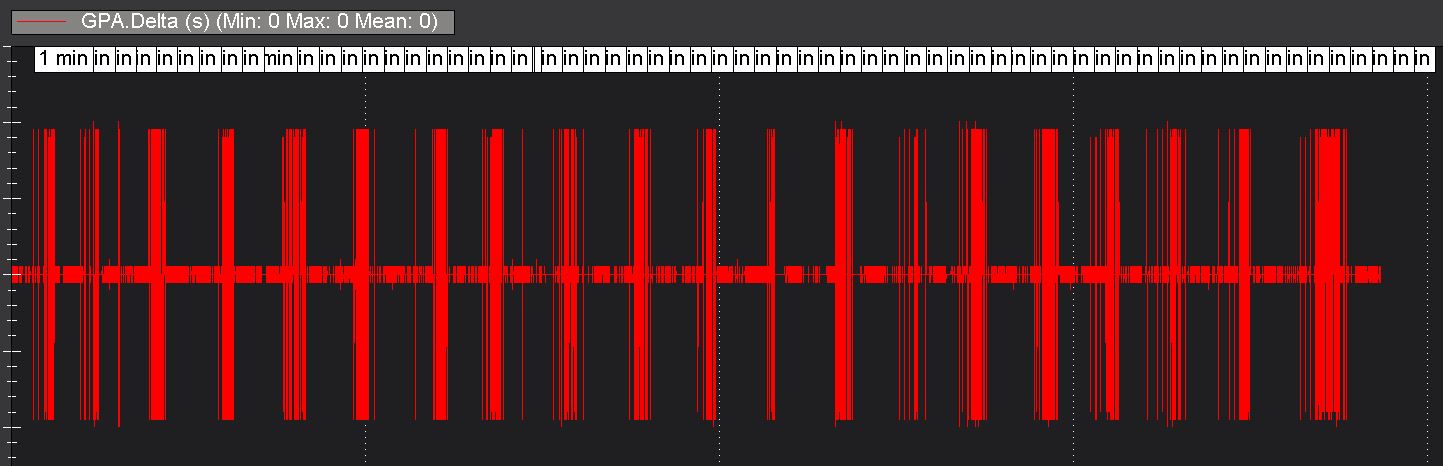
I mistakenly thought that the other GPS I have connected had the same delays, but I was looking at the same graph by mistake! I see now that GPA.DELAY has the expected 200 mSec +/- 20 mSec very perfectly. Only the M8P (above on GPA2.DELAY) had the wild swings. Attached is the well-behaving GPS graph, which is a Ublox M8N - NO problems with it
.
I now have my RTCM3 traffic passing from base to rover over LoRa and baud rate for GPS to Pixhawk fully at 115200. I hope to do a little testing this weekend.
1 Like
Great. Loved those videos on your Tractor by the way.
2 Likes
Added a note about my move to LoRa in newer (Rev 2) version of draft document on using U-blox C94-M8P: https://www.dropbox.com/s/fhvncm3qlkhkmzz/Using%20U-Blox%20C94-M8P%20with%20Ardupilot%20on%20a%20PixHawk%20Rev%202.docx?dl=0
1 Like
Back to the title of this, I also get “Bad GPS Health” at times with the Here+ running Plane 3.9 latest. It seems to be unrelated to having RTK float, fix, or no correction at all. My understanding is that it drops a message randomly. It happens about 2-3 times an hour for just a split-second.
Good advice I got from @WickedShell above at about post #50 was to look at GPA.Delta or GPA2.Delta in the Data Flash Log file for a fairly long mission. If you see times more than +/-20mS from 200mS, the autopilot is missing packets from the GPS. You can see my troubles in the graphs I posted above before I got mine working well.
For what it’s worth, I still have a few “Bad GPS Signal Health” messages though on my Ublox C94-M8P over the course of several hours. I seem to notice them mostly when the GPS is about to switch from Float to Fixed or after some kind of disturbance, such as a loss of the RTCM stream from the base. I just assumed the GPS module was bogged down with calculations or something and missed sending out data on time.
2 Likes
Hi Kenny
We corresponded earlier on this subject. I have been working on a similar system but not using a pixhawk but starting from scratch with a different micro processor and code. I must be nuts. The system is very basic in comparison to the pixhawk but does its job. I noticed from your video that you are using a zero turn mower. I assume it is a hydronic driver version. How did you tap into the hydraulics to take control of the steering. Also can it still be used as a ride on mower? Operated by a human. Or is it now purely autonomous.
Max Birley
+1 830 888 0626
+44 7397 183270
Skype mdbirley
Have you updated this note at all?
Max Birley
+1 830 888 0626
+44 7397 183270
Skype mdbirley
Max, I remember our correspondence. I cheated and didn’t directly interface to the hydraulics, but rather am using a linear actuator to move the sticks that the driver normally moves. My mower had pressure cylinders to dampen the movement of the sticks to give them a better feel for the driver, I guess. I was able to remove them and connect the linear actuators in their places. I expect these to fail at some point as they are not meant for continuous duty. I thought one had failed yesterday, as a matter of fact, but with a quick check just now, I think it is OK. I will be hooking it back up to the control system later and will know for sure. My parts list is in the description of my 1st Overview Youtube video. I have made a few changes, however, which I talk about in some of the later videos, but I have not really given the details. I hope to record an update video soon and/or create a blog post here. The actuators and the control boards have not changed, yet anyway. I did connect a computer via USB to the control boards and make a change to the parameters which greatly helped the performance. I will be glad to share the details of any of this!
Linear Actuator (2 required): https://www.robotshop.com/en/p16-line…
Actuonix Linear Actuator Control Board: https://www.robotshop.com/en/actuonix… (Note: I believe you could easily do this function with an Arduino or other controller.)
YouTube Overview Part 1: https://www.youtube.com/watch?v=kyI7HjmpcVM
1 Like
By the way, I have had some good suggestions of other actuators in this thread: Skid Steer Mower Overshooting pivot turns
Skid Steer Mower Overshooting pivot turns
I have bought a lead screw, a 10-turn pot, and a cheap cordless drill (2 of each). I plan to try to make an actuator out of these. But, if I had not already bought these, I would try some of the suggestions from others. The little linear actuators I have are hanging in there right now.
Many thanks
I will let you know how I get on with my Zero turn. I will not be back in the States until Christmas
Max