I’m looking forward to hearing about it. If you are willing to come to rural Georgia, I’d be happy to show you mine in person.
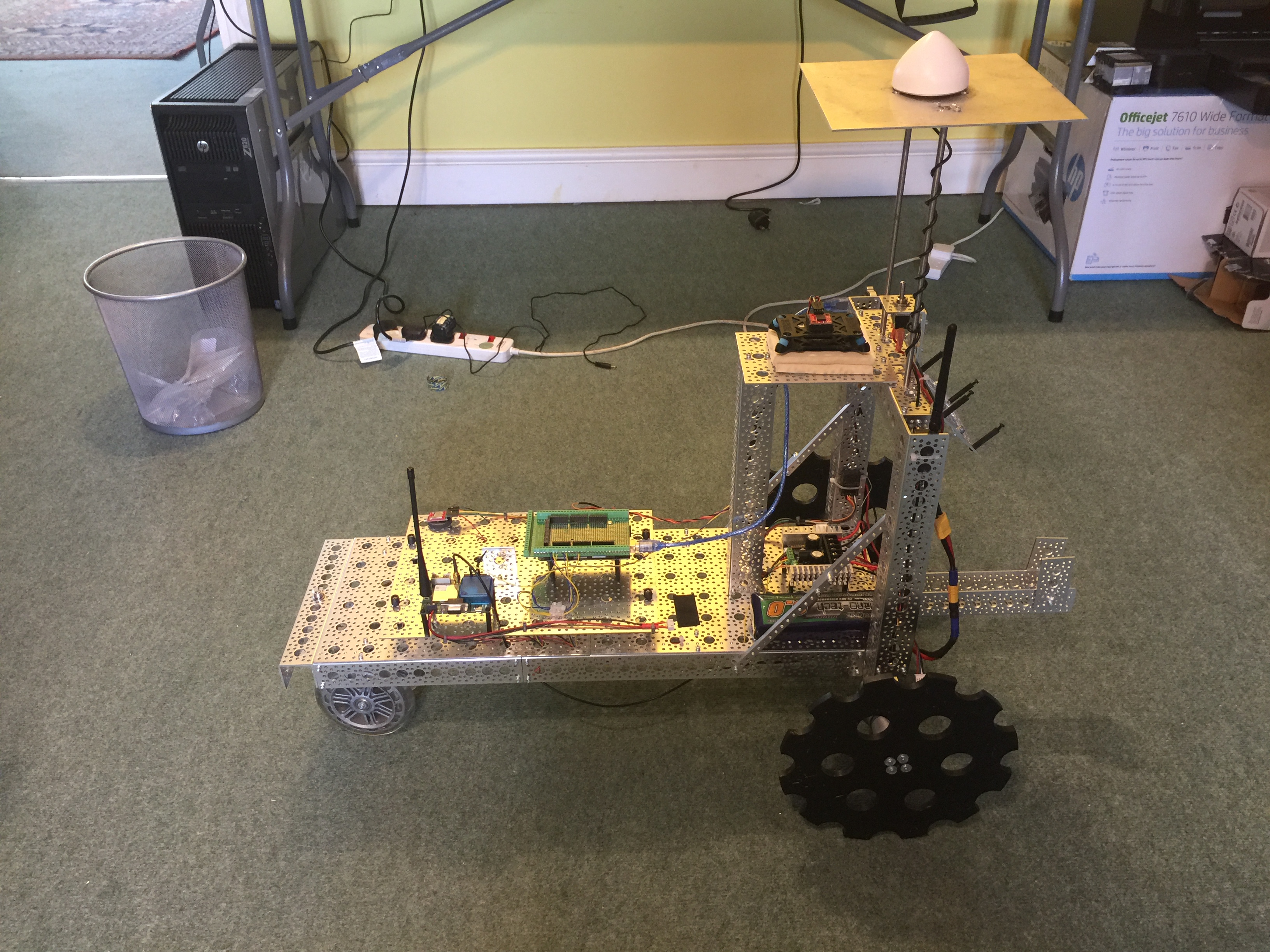
I have mainly been working on 2 chassis, one small test chassis
and the other a larger electric driven petrol mower
I am now thinking of making or buying a third chassis to actually cut larger areas. We have a 6ft John Deere Zero turn on the Ranch in Texas. However I do not want to mess with it as we need it to cut the grass.
So I was thinking of buying either a used ride on mower (conventional steering) or a used hydraulic zero turn. From your experience which do you think would be the simplest to modify to get a reliable working mower chassis.
Your offer to show me your zero turn is most appreciated and when I have something to show the offer is reciprocated
.
Are you aware that Ublox is coming out with a 2 phase rtk gps in a few months??
regards
Max

Max,
I really like your works in progress!
I have not built a conventional, Ackerman steering autonomous vehicle so my thoughts could have flaws but that never stopped me from giving my opinion before! So:
- Being able to do pivot turns is a very useful feature for a lawn mower that may have boundaries that it must stay within or objects to avoid. So, that is a pro for zero turn.
- I think that a zero turn has less likelihood of having a hardware malfunction in a way that would cause it to drive away and cause damage to itself or property. I say that because if, say one of the steering actuators locked up, the steering PID controller will try to compensate with the other side. The vehicle is likely to go in circles or some kind of pattern but not go straight. If the steering of an Ackerman setup locked up, I suppose that the vehicle could drive straight ahead. In both cases, it would be wise to have some safety mechanism such as a geofence that stops the vehicle if this happens. I plan to implement something like that but have not yet.
- Tuning the steering and throttle functions are probably easier on an Ackerman system since the two functions are independent. With the zero turn skid steer setup, there is some interaction between the two. My tuning is still lacking. I am mowing at a slow speed if 0.6 feet per second. At that slow speed, a small change in either wheel’s speed turns the vehicle a fair amount. That is what I think anyway. I could be wrong.
Hopefully others with more experience can jump in here with their thoughts.
Unrelated to Skid Steer versus Ackerman, I think going with a larger mower, as opposed to a 30 inch or so, is very worthwhile. For one thing, you can have more imperfect tuning and still get the job done. I hate to admit it, but at present, my mowing is on a 30-inch spacing even though my mower deck is 60 inch. I have room for tuning issues.
Re Ackerman vs skid-steering, so far I’ve found tuning the skid-steering is easier because the response doesn’t change very much depending upon the speed of the vehicle. In an Ackerman steering vehicle the response becomes very fast as the vehicle speeds up. We have compensation for this in the code but I still find skid-steering is easier to tune.
Ah, very interesting. That takes away the only pro I had for Ackerman.

Have you got worked with your NMEA gps ?