Looking at log TTA
Some of the parameters that we are discussing for TTA2 actually make sense, like the notch filter frequency looks about right, the PIDs look reasonable - the attitude control looks better.
So the plan is to continue what we are doing for TTA2, a methodical tuning using all the normal methods before jumping into missions.
There is approximately 28 minutes of flight in that TTA log, I cant see how that would extend to 50 minutes though unless you take away some weight. The battery wasnt depleted, and I’m not sure if it started fully charged too - so maybe there is some more flight time there, but not another 20 minutes.
Yes I agree that there was 28mins of flight with 22v left in the battery. To achieve 50 mins of endurance we drained our battery up to 19v remaining. Also it is not I am assuming and telling theoretically but I have tested it with MTOW 4kg and achieved it practically.
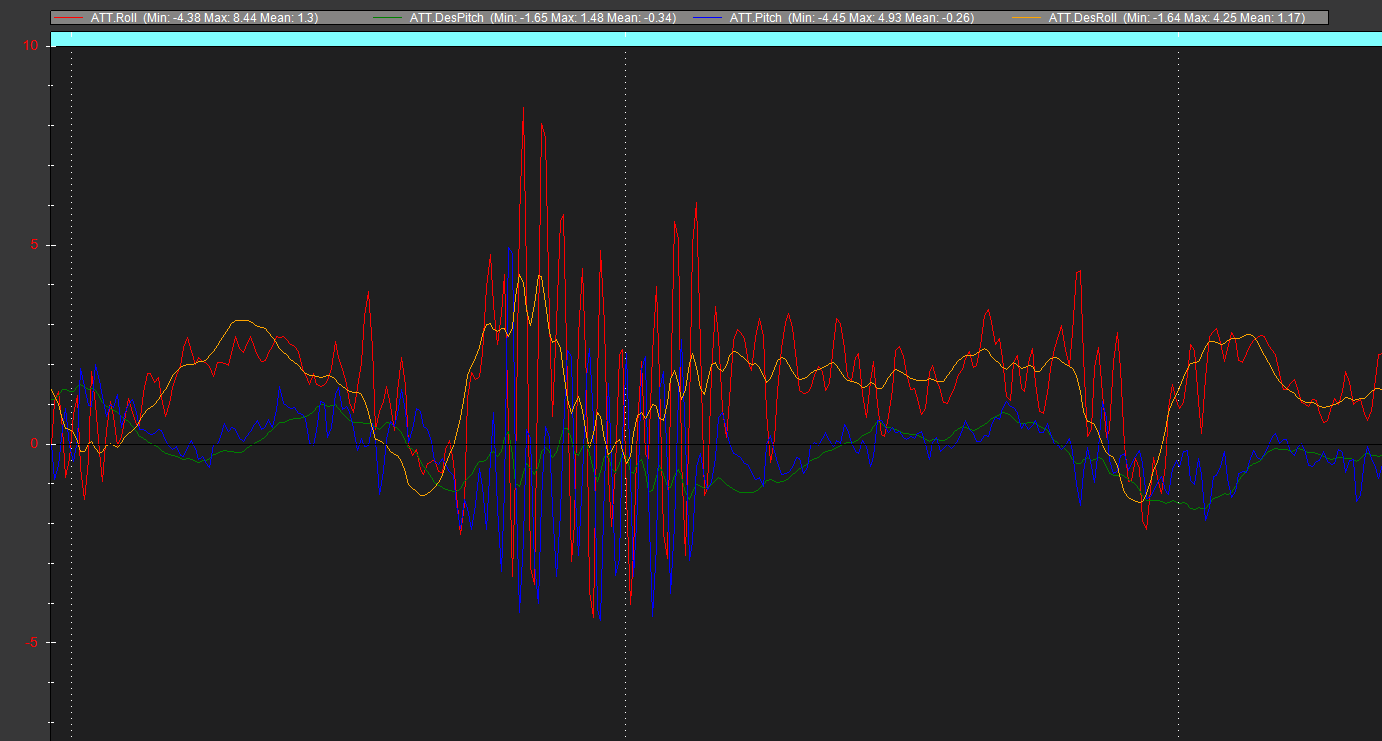
I tried all the possibilities but 4.4.2 does seems good, so decided to downgrade the firmware to 4.3.6 but when downgraded there seems to be a lot of noise in the motors at default values and not allowing for hovering to make it less noise. Later reduced Pitch_D and Roll_D to 50% which is 0.0020(default=0.0036) and applied filters and done autotune. But still there seems to be a lot of oscillations in Loiter mode after tuning done in all 3 axes. After trying for two days, tuning manually by keeping autotuned values we have came up with a stable flight. but as per logs attitude roll tuning need to be improved more and pitch is ok ok . I am planning for tuning roll axis again , should I do with default values or the present tuned values…Please have look on logs on let me know any improvements have to do.
I wouldnt downgrade, there are essentially no differences to the attitude control between firmware versions. For example 4.3.7 has some important fixes to timing that affects attitude control, but if it affects your copter negatively then it means there are things that are way out range of normal flight, as this version should improve flight over 4.3.6
The copter needs proper tuning from start to finish and there probably wont be a shortcut.
Start here and work your way through it:
It seems like you ignored all my suggestions - yes they are just suggestions and you are not bound to use the values I supply, but I like to think I have some experience with this.
If you’ll notice, my suggestions are edging closer toward the parameters in the copter you have that works so well, and your changes are taking you further away from that.
I’ve looked at logs from both copters in detail before I made those suggestions.
I was trying to give you bit of a head start, so you could more easily get to an Autotune stage.
Also I asked if you could:
For the next test flight, just take off in AltHold, do some gentle pitch, roll, yaw, ascents and descents - then do the same again in Loiter mode, then just land. Dont try to do Auto missions or anything fancy.
but you did another Auto mission with no RC control at all.
I’d like to help, and I think my suggestions would help you.
To be honest in past two days I did whatever you suggested but I find no improvement in the copter also as we are building it for sales purpose, in future if clients faces a issue we don’t want to regret and thought it’s better to downgrade firmware version which has least problems and we did it.
And the main reason, for the first flight we started with firmware version 4.4.4 there was more noise in motors we can’t even takeoff at 2m altitude. Later downgraded to 4.3.7 ,this time we didn’t even observed any noise in motors with default values and drone was very stable.Later due to camera issue we upgraded to 4.4.2 and we observed bad behaviour in auto and RTL mode. Lastly 4.3.6 seems good for us. Please don’t mistake me…I have followed whoever gave suggestions to me…if it would have worked I couldn’t have changed firmware version. Please don’t mind.Aa we are working on this drone from past 40 days and in this firmware we are bit satisfied.
I am listening to you, and trying to take everything into account.
The parameters I provided apply regardless of the firmware version, so can certainly set them all.
Hi Prashanth011,both xfacta and Amilcarlucas are very experienced at tuning all sizes of Ardupilot based craft and have help a lot of flyers on here including myself there advice is the best you can get please listen to them and you will end up with a great flying machine
@xfacta Thank your for those suggestion but I have applied all your suggestions even though I am unable to reduce the motor noise even after changing those…I will update the logs…and main thing I was facing was copter is not triggering RTL for failsafe’s. Those are geofence failsafe(vertical and horizontal) battery failsafe, RC failsafe and GCS failsafe even after waiting for 2 mins. I am not able to point out what’s going wrong. I face this issues in firmware 4.4.4 , 4.4.2 and 4.3.6. I am attaching a log below.
I dont know why I would look at this log, it’s the same as all the rest where attitude control is poor and you dont appear to have done any of the things I suggested.
There is no new data to look at.
If you made all the changes I suggested, then where is that log?
Definitely upgrade to latest stable firmware - using an earlier version is probably just masking some issue instead of fixing it. The new versions have been tested extensively.
I’m not sure how you arrived at the PIDs you have, for such a big copter.
I would say you’ve misinterpreted the original tuning guide and kept lowering some PID values thinking an oscillation would go away.
The problem you are seeing now is a D term oscillation, NOT P term. So by lowering P terms you are increasing the ratio of D to P, making the problem worse.
Why not just work through the post I did in the exact order I laid out:
ESC calibration
MOT_BAT and thrust expo and motor tests
logging and PID changes
Then fly in AltHold and Loiter.
How about we get this thing to fly before going too far with testing failsafes.
I’m sure the voltage failsafes will work fine provided you set the correct voltage levels:
Please dont misinterpret my attitude - yes I probably get frustrated BUT I do want to see as many Arducopters flying as possible, and I want to see them flying well.
@xfacta Thank you so much for your suggestion, To be honest I did followed your suggestions but when I used those, I am posting a video how it behaved, we even can’t hover a drone. To much instability due to noise, due to which I did not downloaded logs. Moreover motor temp are high. Anyway I am going to follow your suggestions and post a log but before that If I observed more noise from the motor that even not able to making me fly or hover for 30 to 40 secs. Please suggest me what should be done to remove noise. previously I reduced D terms 50% by default values which made me to remove noise but still it is coming in between. My sincere apologizes to you…I want to fly drone good and I did followed your suggestions. Please have a look on the video.
Use all the other parameters I provided, including those latest battery voltage settings, and adjust to these PIDs:
ATC_RAT_PIT_D,0.0044
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_P,0.11
ATC_RAT_RLL_D,0.0048
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_P,0.12
ATC_RAT_YAW_I,0.05
ATC_RAT_YAW_P,0.5
Would you please let me how did you arrive with these PID values and also if I insert these values what if the oscillations and noise comes… what should be done in such case?
They are getting closer to what is used in your other copter, plus what I see in other similar copters. They are generic enough that they should work for almost any copter within reason.
Be sure to get all the other parameters I specified too - just one parameter, or just the PIDs, are not going to fix everything by magic - I’m trying to provide a “whole copter” solution.
For the first test, just hover for 1 minute or less, then land and check motor temperatures.
If temperatures are up, or if you can hear a metallic sounding noise to the motors, then reduce the D terms to half of what they are now (the new values) and test again.
When it flies reasonably stable, do some basic movements in AltHold then same movements in Loiter.
Try an ascent and descent, then let’s see that log.
Dont rename the logs.
Updated to FW 4.4.4 and followed your suggestions, Initially observed noise and metallic sound, we reduced D term by half the value you provided but still metallic noise is coming and going but not staying constant. Attaching logs below, please have look and suggest what need to be done next.