Hello, I build a custom drone for mapping and survey with following parts
700mm carbon fiber frame.
adti camera
16x5.5 propeller
orangecube plus
16800mah lion battery
Hobbywing xrotor pro 40A esc
380kv antigravity t motor.
Arducopter 4.4.2 firmware version
MTOW= 3530grams.
Dual gps configuration, Here3 Gps and emlid reach m2 ppk .
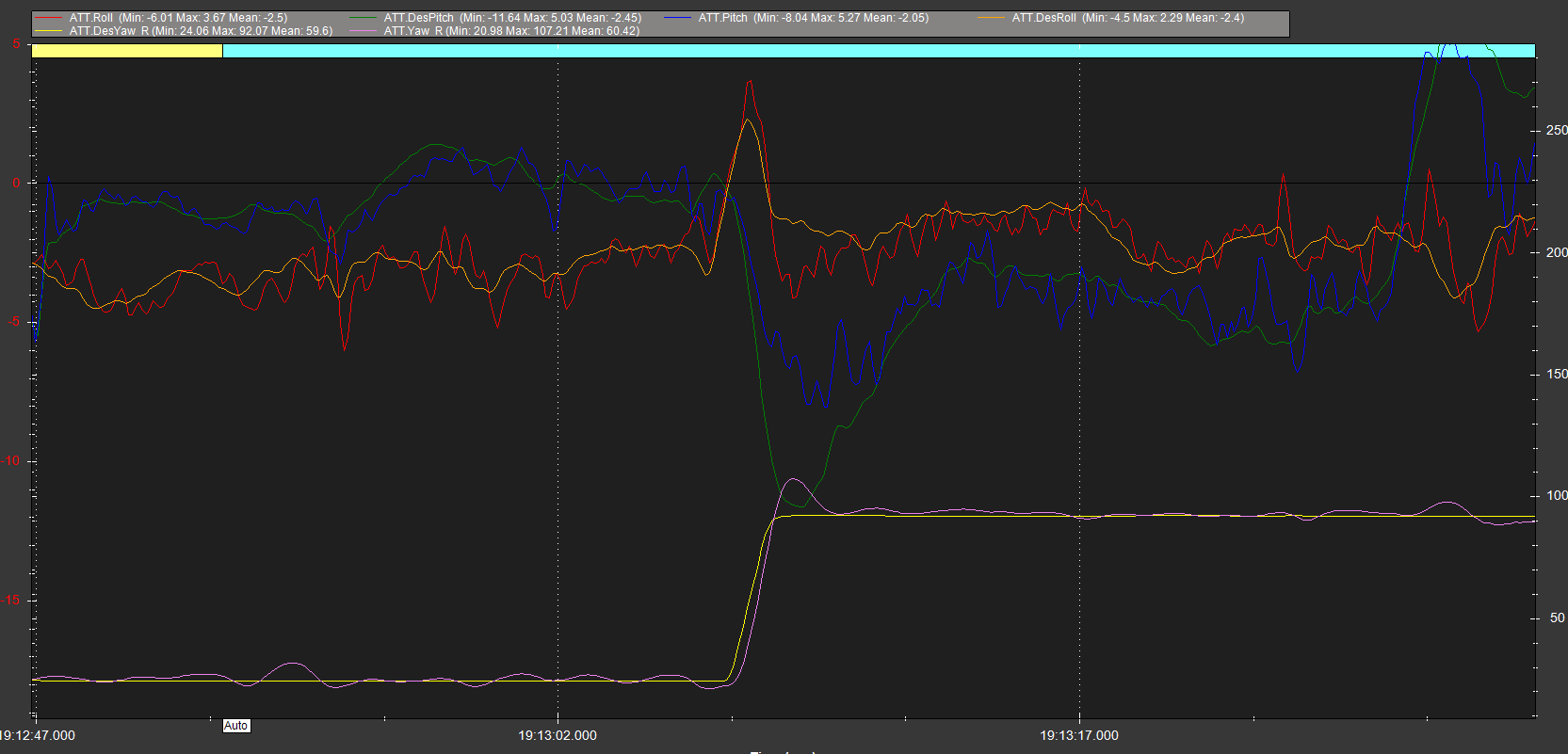
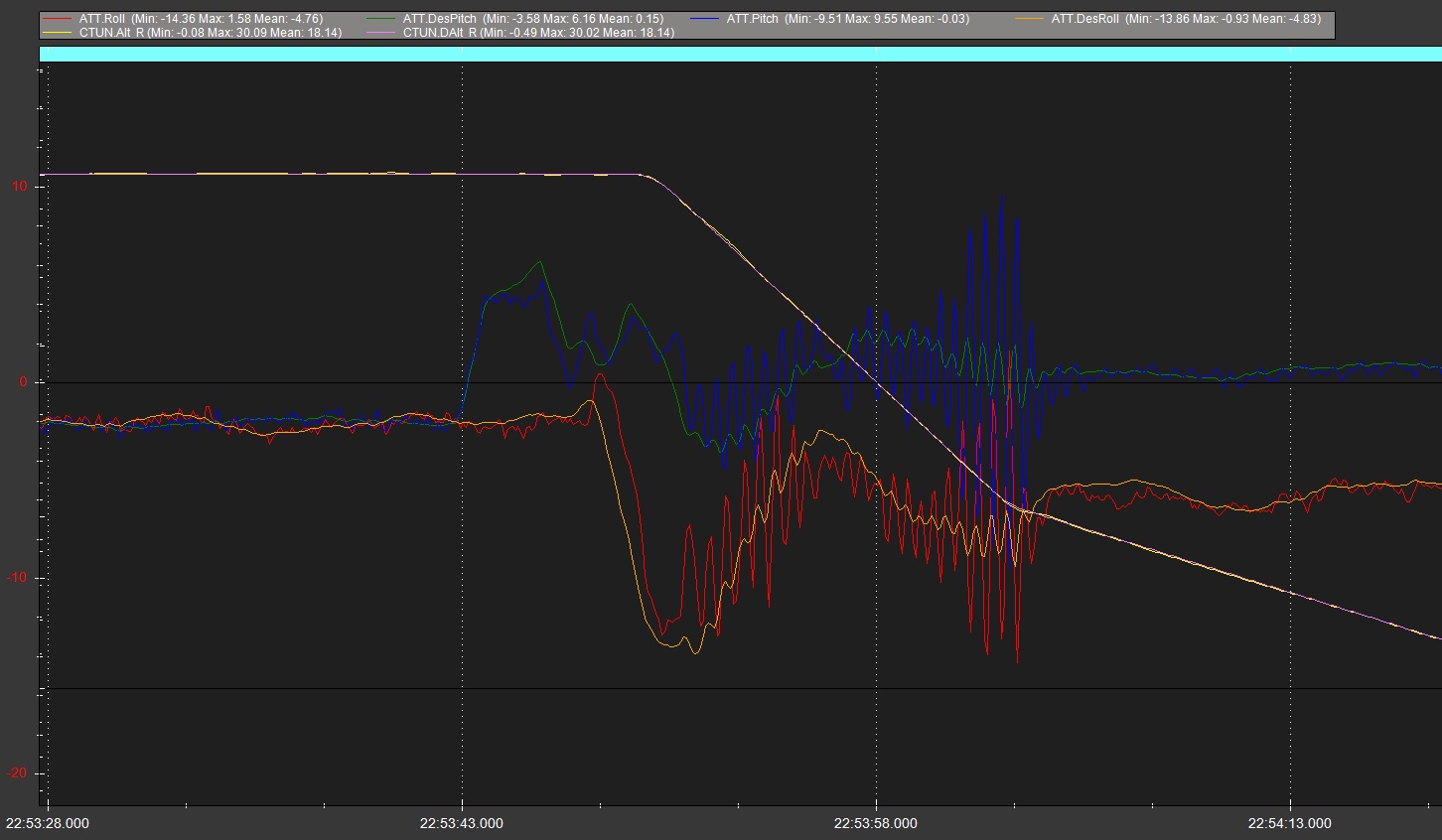
I have done autotune for all the 3 axis and everything went well, once I start testing the drone in althold, loiter, stabilise and positionhold modes its working fine. But when I planned a mission, while in a mission drone behaviour is not stable and it is not following the path. while in yaw observed wobbling ,later manually tuned it to make stable. I didnot get why it is not stable in auto mode and RTL mode. Once I hit RTL command there a more delay in taking and RTL loiter time I set as 2sec but still its taking 20sec RTL hover to desend and if bad battery even though I configured parameters to RTL its not taking. I have attached a log below please have a look.