me in still testing two nodes wired together but with different sensors
1 Like
looks like plenty of fun ahead testing ye he
me I’ve on the way two for other developments
1 Like
Do you have any visual notification that proximity is on or of ?.
You could use something like this 
https://ardupilot.org/copter/docs/common-external-leds.html
I mean more like in the OSD or so ?. I have these messages for the Retracts ect . Or can it be a custom message maybe ?.( give that a try )
In your post Oeble. You mention retracts…are you getting messages in your OSD that tell you whats taking place with your retracts.
Just curious.

wow very cool how did yo do that.
Not really much just setup a RC channel on option 29 and link it to a servo output . The Mavlink text appeared .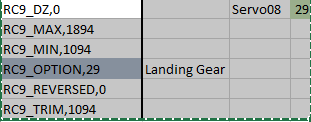
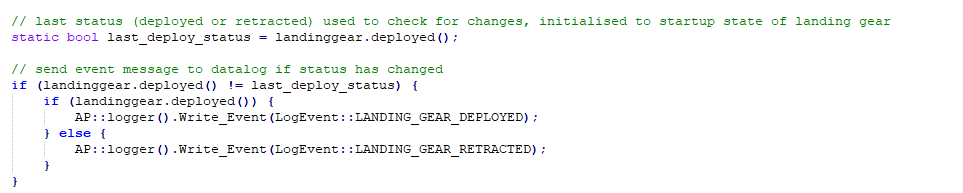
The text seems to come from the Landing_gear.cpp
Oh cool so it’s a default message then in Mavlink. Great to know thank you.
Dear [ppoirier],
could you tell us what configuration to use in mission planner - ardupilot to setup POC rangefinder I2C?
Thank you
Please read the second part
1 Like
Hello sir,
I want quest about setup upward facing lidar
I’m using Lidar liter v3, in orientation forward facing lidar, the object avoidance can work
but if i’m setup orientation upward facing, there massage Prearm check proximity sensor
any idea ?
thanks before
@Dewa if you can send your parameters (or a .bin log file) and tell me what version of Copter are you running, we can probably pin point the problem
@rishabsingh3003 im using copter 4.0.7
RNGFND_GAIN,0.2
RNGFND_GNDCLEAR,5
RNGFND_MAX_CM,4000
RNGFND_MIN_CM,5
RNGFND_OFFSET,0
RNGFND_ORIENT,24 (UP)
in proximity sensor
PRX_TYPE,4 (rangefinder)
proximity sensor can’t read (massage Prearm check proximity sensor)
all orientations work fine except facing up
@Dewa this seems to be a very small bug in our Proximity library.
I’ll fix it soon but it’ll probably only be available on Copter 4.1 beta, not 4.0.7.
If you have a forward-facing rangefinder, and an upward-facing rangefinder, it should still work. The problem is only when we have an independent upward rangefinder.
Sorry for the trouble
1 Like
@rishabsingh3003 wow…this is very helpful information
So, if I use 2 lidars with Upward facing rangefinder and down facing rangefinder, will it work too?
@Dewa it’s very unlikely that would work. Only a forward-facing lidar + upward-facing together might work.
What flight controller do you use? Will, you able to test the bug fix if I send across the fix on top of Copter 4.0.7 (you will have to flash the firmware again through Mission Planner)? You can of course flash the firmware back to 4.0.7 official (without taking off) as soon as you confirm the prearm checks are fine.
1 Like
@rishabsingh3003 Im using Omnibus F4 Pro
I really hope if I get the update and can test it soon
I am very grateful 
I saw the experiment, for Upward facing and downward facing and successful
I don’t know if there’s a difference