May I suggest you start a new discussion as this is not related to this blog.
we are working on a similar solution too except that we are including an intermediate controler between TFMini arrays and flight control in order to smooth out values and fuse them with different kind of sensors (US sonars and other lidars)
we also constructing fake TowerRanger frames to enters in proximity ap lib
Yep , just like my old setup
 yep except that for exemple we fuse 2 lateral tf mini readings to avoid (as mutch as possible) blind spots before sending it to fc
yep except that for exemple we fuse 2 lateral tf mini readings to avoid (as mutch as possible) blind spots before sending it to fc
Cool
keep us updated 
yep first tests was ok but my boss ask for down sizing number of lidars so I have to do oposit instead of 8 or 10 point I have only 6 and need to extrapolates the 2 missing sectors ( working less less better  )
)
Hi
How do I configure the tf luna for I2C , I have tried the above steps but I have no luck.
@Oeble_Huygen can you please answer?
I have now sent the commands using the new benewake gui and trying to read the i2c address using an arduino uno but it keeps giving my irregular results saying unknown address found at 0x**
I will…Thanks for bringing the post under my attention
Hi Jaco , please describe what you want and what you already tried and your hardware if possible.
Hi Oeble,
So the objective is to connect 2x tf lunas and 1 lightware SF000 to a Hex cube black using s mini carrier board. To be used for obstacle avoidance.
I am currently using an Arduino Uno for the passthrough to the Benewake Gui. I am getting the distance readings and all.
I have also tried sending the commands to set the Address change to I2C and save , and then using an I2C scanner to check the Address but when I get tp that point it gives me irregular results like “unknown error at address 0x**” more often than not.
I am not shure If I have changed anything at all on the sensors or not?!
I don’t know If I am perhaps doing something wrong that it is not setting the address of the Luna. I am going in circles and not getting anywhere.
It would be greatly appreciated if someone could walk me through the process.
@ Jaco,
Step one - Update the luna firmware.(grounds disconnected)
https://drive.google.com/file/d/1bTkoCZtkhuuVZAzKI62OmwqPqmXsMU8P/view?usp=sharing.
Or this one-
https://drive.google.com/file/d/1nBK6DKMCsqkglrK0LP9iEbl6VUPuMFkj/view?usp=sharing
Step two - I2C connection requires the two grounds connected to each other.
Step three - To test the lunas (serial -grounds separated) .
http://en.benewake.com/support_data?catename=03c54a91-8f9a-409f-985d-37acc68f7bf4&supportid=64e3ba1e-f9c5-45a4-a329-b9f16ac85ab9
To see the I2C adress, (grounds connected)
https://gist.github.com/tfeldmann/5411375 ( get baudrate right in INO ).
If you succeed , we can go on to changing the I2C adresses.
2 Likes
Hi
I have now flashed it with the new firmware successfully.
I followed the read me and also ran the I2c command code. changed the 0x1E to 11
then loaded the i2c scan , now It scans and finds i2c address as 0x11, but I am not sure if that was the correct move.
Does the sensor need external 5 volts or can it be taken from the Mini carrier board?
Lidars should allways be supplied by a dedicated UBEC, generally a 5Volts 3Amps.
1 Like
I have successfully changed the addresses and is now scanning and showing each respective address.
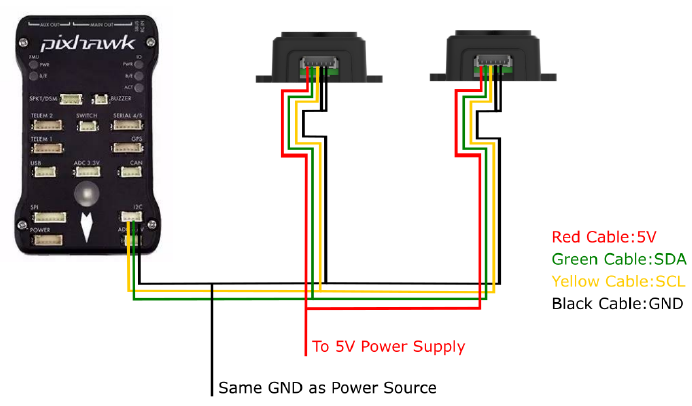
I have it connected to the cube black like in the image above. but only with one sensors for now.
I set all the relevant params that I can think of but still nothing 
Hi Oeble,
I finally got it working!!
thank you so much for your help it is much appreciated!!
kind regards
3 Likes
Hello everybody,
@ppoirier Do you mean 1x 3A BEC for each lidar or 1x 3A BEC for all 8 lidars ? Do you think 1A (2A burst 15s) is ok with 4 TFMini-S ?
BTW, thank you for all your posts ! They are very detailed and playful. Please keep up your amazing work, very precious for all the ardupilot community.
Thanks
Thank You 
Yes it is 3Amps for all as they are sequentially activated, as for lower power, I suggest you add a 400uF capacitor to absorb the activation load
1 Like