I’m trying to autotune my S500 Quad copter with a Pixhawk 2.4.8 but auto tune just won’t engage. Instead of me guessing what info the forum needs to help me out please let me know and I will gather it all at once. I’m using Mission Planner to configure everything and I do have logs from test flights.
A .bin log is helpful.
There’s a good chance your sticks are not centered. There should be no trim in the transmitter and the copter should be hovering with the throttle stick centred. Fly in AltHold for a while, just hovering to see how the throttle ends up.
1 Like
Thank you for the quick reply. Full disclosure: I’m absolutely a noob at this. Today was only my second attempt at flying my quad. Though I do believe I have done a good job of configuring it (took me several weeks). The quad hovers pretty good in PositionHold and Alt Hold. Below is a link to today’s flight log.
While I’m at it, here is my params file:
Nothing to see in that log, it’s not flying. Post one of an AltHold hover (forget about Position hold).
You may as well set these now:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
You are using the wrong firmware. Pixhawk1 (not fmuv2) is correct for most 2.4.8’s.
You are using Dshot600 but ESC telemetry is not configured. This will be useful.
Not ready to run Auto Tune…
It’s a good idea to learn right away how to open and view a log. If nothing else for the messages that are presented which will help troubleshoot a problem. In this case you would see this:
![]()
Note: fmuv3 is for the 2.4.8’s that have 1 IMU. Yours has 2 (a good thing) so Pixhawk1 is correct. Granted there is still confusion about this.
1 Like
I don’t understand that. It flies just fine though it does exhibit some odd behavior but I have been able to get it back under control.
I will definitely follow your instructions and reflash with Pixhawk1 and set the params you mentioned. I don’t know what “ESC telemetry” is. If you mean telemetry between the Pixhawk and GCS, I don’t have that kind of hardware (can’t afford it right now as I don’t even own a laptop for the field).
I did try to analyze the logs but apparently the app store version of Mission Planner can’t do that (that is what the pop-up dialog said). And I wasn’t able able to find any help in translating the logs. Can you point me in that direction, please?
It will take me a few days to get to this and get another test flight in. I will get back to you then.
Thanks again for your help! It is greatly appreciated.
Perhaps it does but I doubt that based on 2 things. The MOT_THST_HOVER value and defaults PID’s and PSC’s. But whatever, the log you posted it’s not flying so no way to know. Post one where it is.
It’s serial data from the ESC’s to a serial port on the Flight controller. It provides valuable data (Motor RPM Primarily) What ESC’s do you have?
Use a Windows PC
Mission Planner
1 Like
MOT_THST_HOVER does look crazy. I have MOT_HOVER_LEARN set at 2:Learn and Save. Could that be changing MOT_THST_HOVER? What values would you recommend for these parameters?
HGLRC 4PCS 30A ESC 3S 4S 5S ESC BLHeli_S Electronic Speed Controller
I went to DShot ESC’s because I could not get my Pixhawk to arm with any of the others. I have since figured out why (the Barometer ARMING_CHECK was failing).
I’m not sure if my DShot ESC’s support telemetry logging. I can’t find a data sheet for them and haven’t been able to grasp how to set that up. Still researching.
Thank you! I didn’t even know an .msi for Mission Planner existed. GitHub recommended building Mission Planner which requires Visual Studio, blah, blah, blah. I didn’t want to go down that path. I will install the .msi tonight.
Flashing Pixhawk1 went easier than I thought. I’m running Windows 10 on a VM inside Ubuntu and the VM kept disconnecting the USB port when Mission Planner rebooted the Pixhawk so the firmware install could never find the port. I had to use QGroundControl to flash Pixhawk1 v4.3.7 then went back to Mission Planner. So I may be able to get a test flight in as early as tomorrow.
Thanks again!
I’m not sure if my DShot ESC’s support telemetry logging. I can’t find a data sheet for them and haven’t been able to grasp how to set that up. Still researching.
You should probably flash BLHeli_S BlueJay firmware to your escs, and flash bdshot firmware to your FC. Then you are able to set up Bi-directional DShot.
Just perform a hover in AltHold for a minute or so. Reviewing that log will determine how several parameters need to be set before attempting Auto Tune.
They don’t you should have went with BLHeli_32 ESC’s. Typically what @ROSStargh suggested with Blujay would be the right approach but there is not a Bdshot version of firmware for that Flight Controller so you are out of luck for ESC telemetry. It’s OK, you can use Throttle reference for the Dynamic Notch filter. This has to be configured also before you attempt Auto Tune.
Dave, I was able to get a few test flights in yesterday. I’m slowly learning how to read the log file. You can see it flew in Alt Hold for almost 3 full minutes before a BATTERY_FAILSAFE triggered an RTL. Which is confusing seeing as I had a fully charged 4S 14.8v 5200mAh Lipo that started out around 15.8v. I have BATT_CRT_VOLT set at 14v and I do see several dips below 14v with the longest one lasting 10 full seconds between 14:09:04.178 - 14:09:14.209 which is when the RTL was triggered. When I got home and measured the voltage the battery was still sitting at 14.4v. And the VoltR never even got close to 14v. Ten seconds sounds like a reasonable time to trigger the BATTERY_FAILSAFE though I don’t see a parameter for configuring that.
What might be happening here and how do I correct for it?
So it flew in Alt Hold for 3 minutes. What kind of information am I looking for that will help me determine those “several parameters”, what are those parameters and how do I determine their values?
I cranked up the logging on just about everything.
Though I set the “Fast Harmonic Notch Logging” on I didn’t see the separate parameter for INS_HNTCH_ENABLE until preparing this reply.
There are several INS_HNTCH_ parameters. Which ones do I set and how do I interpret them for Auto Tune?
Here is the log file and latest parameters.
I’m sure you have better things to do this weekend so if there is anything further I can do this weekend, please let me know.
Thanks again!
@dkemxr
One other thing I forgot to mention. I had to disable the Barometer arming check because the Pixhawk won’t arm with that check in place. Does this mean the barometer is bad? Could this be causing my problems?
Thanks! Have a great weekend.
It means you need to use the Pixhawk1 firmware (if you havent already) and set
BARO_OPTIONS,1
because some of the manufacturers (and I use that term loosely) changed the barometer fitted to the board.
Then you can set ARMING_CHECK,1 again.
OK, now disable a lot of that. Did you try to view the FFT for Notch Filter setup? Hint- It won’t work with that ridiculous logging you enabled. The default bitmask is all you need at this stage (or ever). Also set this back to 1 INS_LOG_BAT_MASK
Massive output oscillation. I’m posting this graph so you know what to look for as tuning advances:

To get control of this cut the Rate Pitch/Roll PID’s in half. Here are the Pitch parameters, do the same for Roll. Defaults are showing cut them in half.
ATC_RAT_PIT_D,0.0036
ATC_RAT_PIT_I,0.135
ATC_RAT_PIT_P,0.135
Then do another AltHold Hover flight.
Did you manually set the MOT_THST_HOVER to 0.5 and turn off learning? It’s actually ~0.17 (from CTUN>Tho). Turn learning back on, manually set MOT_THST_HOVER to 0.17 initially and then don’t manually change it after that.
1 Like
You really need to be looking at current draw here as well. If it is dipping that low that quickly you likely have a high current draw, which while often is due to underpowered power system, is also common with PID issues (oscillations). Also the battery will bounce back after disarm and especially after unplugging so checking when you get back home is nowhere near a good indicator.
Actually I see you are referencing timestamps? Is that 14-ish mins? Seems like it could be a decent time, but still need to review current draw as well. I dropped my current draw from 24A at hover to 17A just by adjusting PiDs.
Hey Brian, Thanks for your reply!
I will definitely look at current draw. I’m still learning how to read and interpret the log file but I’ll figure it out. The 14:09:04.178 - 14:09:14.209 represents a hair more than 10 seconds. It looks like a standard time stamp but the 14 would be 2PM and that is nowhere near correct. I don’t really understand how the Pixhawk would know the time anyway. Unless it has an internal battery and the time was set at the factory, which I doubt.
I don’t know where I got 14V for low voltage on that battery but while investigating it again I settled on 12.8v for low voltage on my 4S 14.8v Lipo. I just got back from the park and haven’t had a chance to look at the logs yet but I did get several flights in with no low voltage fail safes except when it actually did run low on the last flight with that battery. It executed a near perfect RTL then I swapped in a new battery.
It was too breezy today to get any good log data for trouble shooting my tuning problem. I had to keep pulling the drone back to me so I’m assuming that kinda invalidates any ALT HOLD data for tunning trouble shooting. @dkemxr is teaching me how to read the log files and I’m scouring online resources but can’t find a whole lot of detail. The ArduPilot documentation seems to assume you already know how to interpret the log files. If you know of another source (besides the 2 hour YouTube video I found which again, assumes you already know how to interpret the logs), please point me in the right direction.
…
No, not really. Best option is to follow along with suggested changes and graph views and build the experience from that. Read other posts about tuning issues and find a relation to what you are seeing.
1 Like
4S Lipo battery voltage settings:
BATT_ARM_VOLT,14.70
BATT_CRT_VOLT,14.00
BATT_LOW_VOLT,14.40
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
MOT_BAT_VOLT_MAX,16.80
MOT_BAT_VOLT_MIN,13.20
anything different and you will ruin the battery. Either that or the voltage monitor is not calibrated correctly, or the charger is at fault - but do not deviate from those values I put there, find and fix the other problem.
1 Like
I honestly haven’t paid attention to mine but I feel like it’s using the time you download the log. Maybe.
As others have said 12.8v is far too low for a Lipo. I use 14.5v as my warning and 14.0 as critical (which gives me time for a RTL without damaging the battery).
Nope lol, I’ve learned from folks here telling me what to look at, and also just playing in the log browser myself.
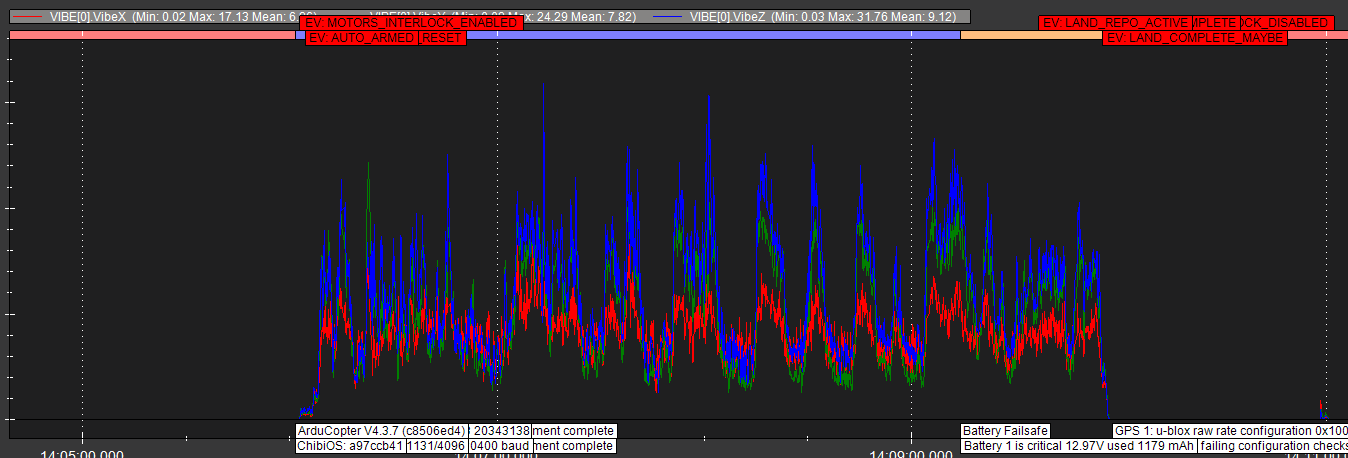
Couple things here, your vibrations (VIBE X Y Z) seem high, my frame is about the same size and I had to work to lower those. Along with affecting flight stability, this makes your motors work harder and draw more current. These are from your 06-01 log:
If you go to BAT → Curr in logs you can see your current graph. If you add Volt as well you can see how current drops your voltage (and that’s when you hit failsafe, near the end with a constant higher current draw).
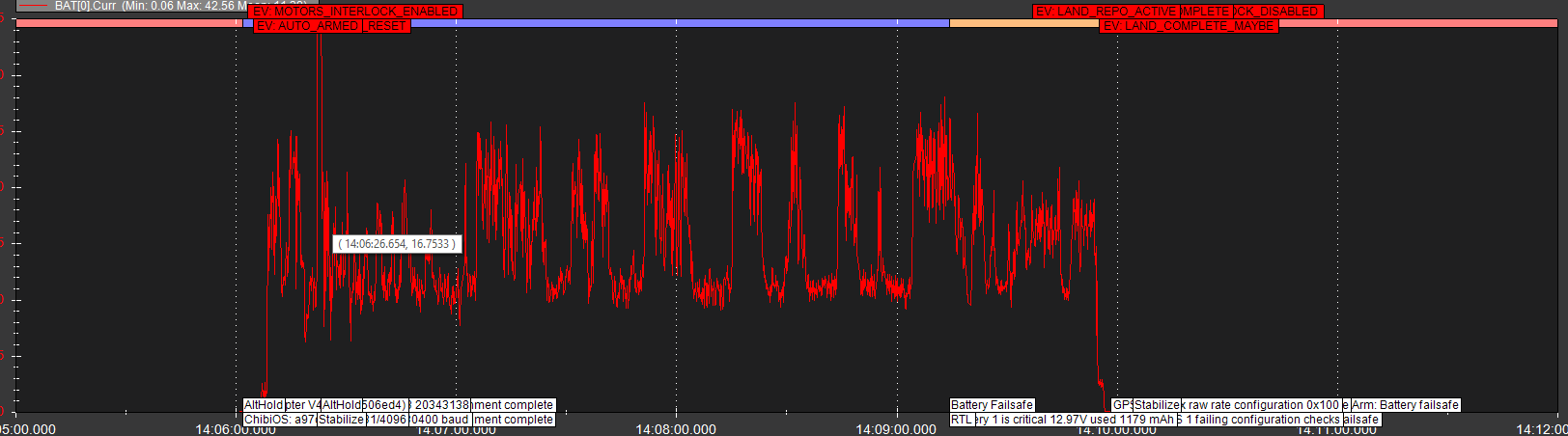
Something doesn’t seem right though if your battery is sagging that badly, though it looks like your battery was maybe already low to begin (15.8v before arming)? Or voltage isn’t calibrated?
1 Like
@dkemxr , @droniedarko , @xfacta
All great advice, thanks. I’m studying today’s breezy logs as I write this. I’ll look around for other posts with similar issues.
Go ahead and post the logs! I am maybe 0.00001% as knowledgeable as the other folks but I like looking at other peoples logs, if anything just to learn myself. Im sure it helps the smart folks here to see the progression as well.